 lion mclionhead
lion mclionheadFewer symbols & shorter timeouts were the key to the remote control. The algorithm of using timeouts to frame the code & buffering a complete code continues to be the most effective.
Noted that the boundary magnets have to be 90deg offset from the home positions of the motors. That way when all 3 motors are manually lined up before a reset operation, the motors know which way to turn to find the boundary magnets. The boundary magnets are only used for finding the home position & ignored afterwards. That's why the bearing gears are removable.

The outlet magnet doesn't matter. It's only lined up for consistency. There's so much play in the bearings, the hall effect sensor barely detects anything. The motor mounts might have to be reprinted.
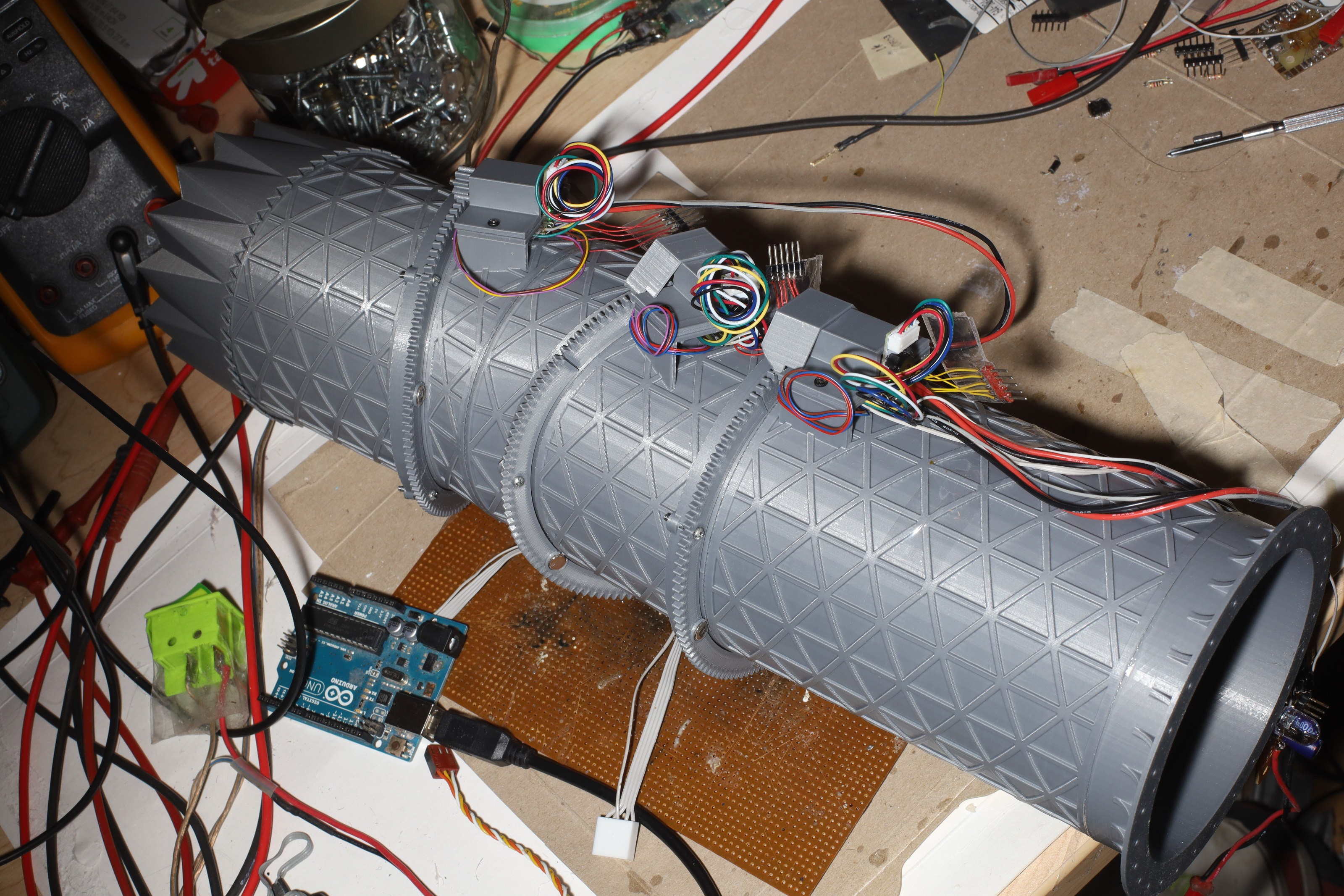

Noted the farsteners for the bearings still have to be bolts. 1 of them has to be longer to manage the cables.
The 1:298 motors are so slow, it might have been better off with 1:150, but 1:298 has the most accuracy. Even at 1:298, the position only gets within 100 motor revolutions. Nozzle 2.0 was only built to improve accuracy.
The motor position for nozzle roll is directly taken from user input. Motor positions for nozzle pitch come from a table which was created empirically. Adapting the table to the new nozzle seems to require manually discovering the starting & ending encoder values for the pitch range, then using the tables2.c program to interpolate them into a table.
Helas, the arduino ISP once again died. This time it wasn't generating a reset signal anymore & it didn't come back.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.