 Luc JOB
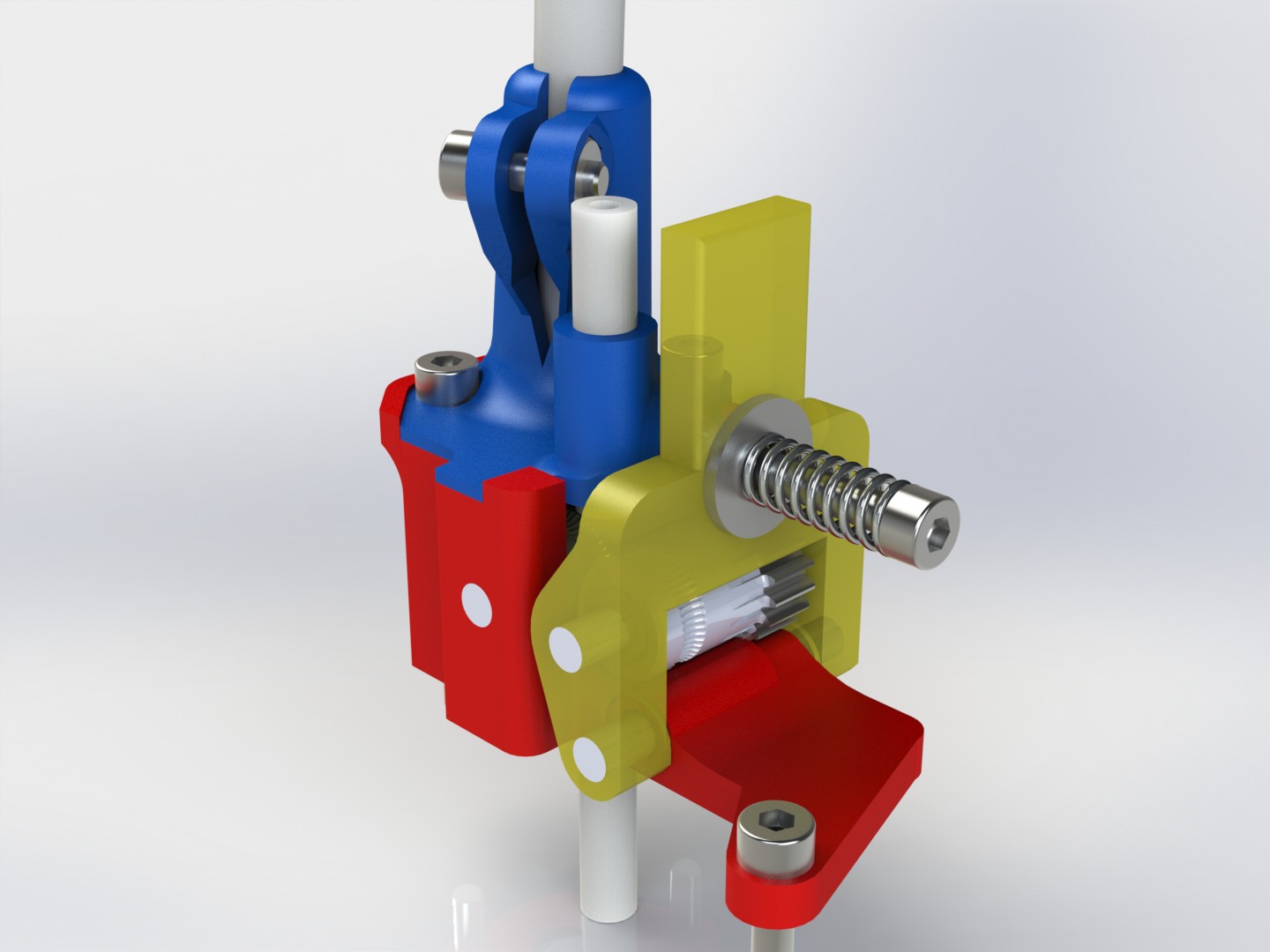
Luc JOBThis design is the most compact version based on 17 tooth drive rollers (8.5 mm effective diameter, 14 mm length). ATTENTION you need 3 axles of 3 mm x 23 mm and 4 needle cages K3 5-7... Usually these kits are delivered with only 2 cages and 1 or 2 axles. See Ebay or Aliexpress for these parts. There are also brass worm gears, with different inner diameters. So one can fit another model of flex shafts than the one supplied by Flexdrive or Zesty.
This remote drive extruder is primarily intended for delta printers where the head inertia must be kept to a minimum, but adaptations to other printers is obviously possible. Weight of the complete extruder with screws is 30 grams.
The extruder body can be modified according to the mounting device on the machine. In the basic version, 2 screws of M2.5 X 30 and one of M2.5x 10 are required. It is also possible to secure the flex shaft holder with shorter screws and inserts, if they are not used to also secure the extruder to the head.
The lever is supported by an M3 screw (insert to be fixed in the extruder body). No spring needed.
The filament is guided by a teflon tube inserted on top of the extruder, and a small piece of the same tube goes under the extruder into the cooler... You can extend the teflon up to your filament dryer if you want...
My parameters for Klipper are 1.332 mm/rev, which is 150.12 whole steps per mm of wire.
I was able to adjust the motor parameters (a Nema 17 -23) to reliably get 1500 rpm, so 33 mm/s of retraction speed. The use of a smaller and therefore faster motor is possible, the necessary torque is very limited. Be careful not to program/adjust a too high current on the motor, as this could destroy the plastic worm screw... I'm using around 0.3 A @ 12V for a 4 ohms motor rated 1.5A.
The quality of printing is there... I did not notice any really visible defects related to this device.
Please contact me for any commercial derivative of this concept, or if you want me to design an adapted mount for your printer.
The files are shared under a CC BY-NC-SA license and available on cults or thingiverse.

 Vittorio Loschiavo
Vittorio Loschiavo
 RoGeorge
RoGeorge
 Zoé
Zoé
 Masahiro Mizuno
Masahiro Mizuno