Intro
Some people would call me lazy for building this, but I would like to think of it as innovation.
This project was a lot of fun to make. It challenged me in many different ways, and I was able to learn a lot from working on it.
Demonstration Video
Design Choices
Turning the doorknob:
My first challenge was to figure out how to mechanically turn a knob when the device was at ground level. This resulted in designing a handle since it can be linearly pulled to form a roation. This was done by 3D printing a handle to fit on the knob.
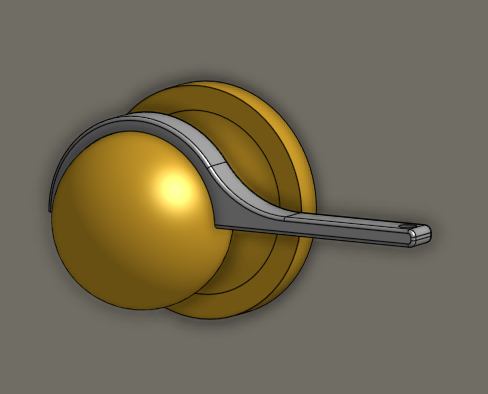
Secondly, I used a fishing line that would pull the handle down. A spool is fixed to a continuous servo motor, then coils the string, pulling the door handle and retracting the inner door latch.
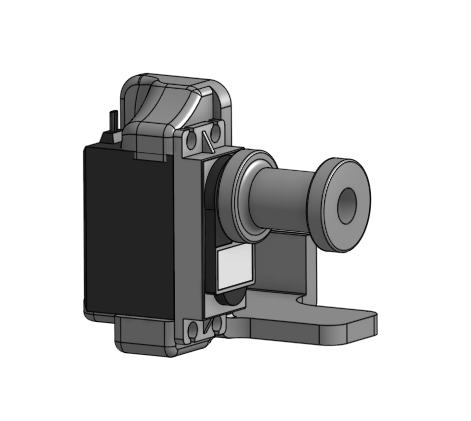
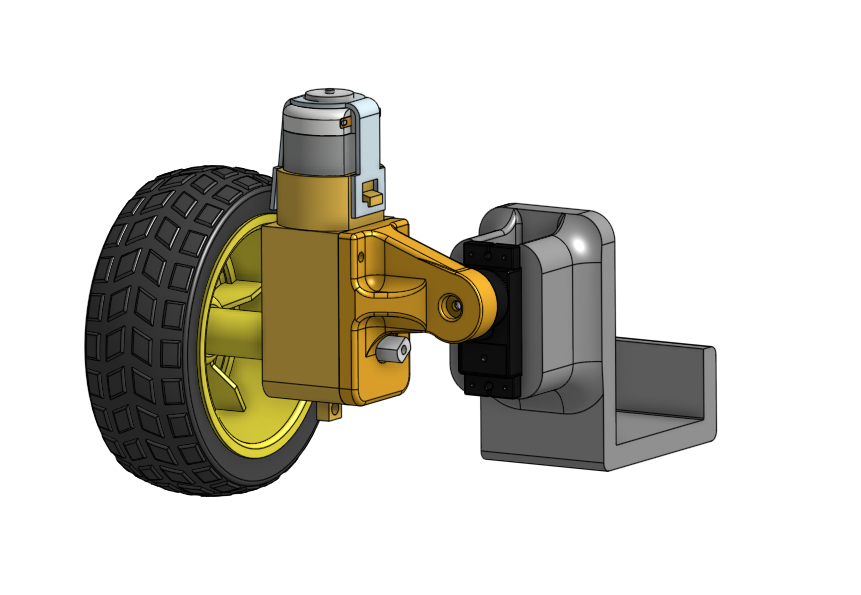
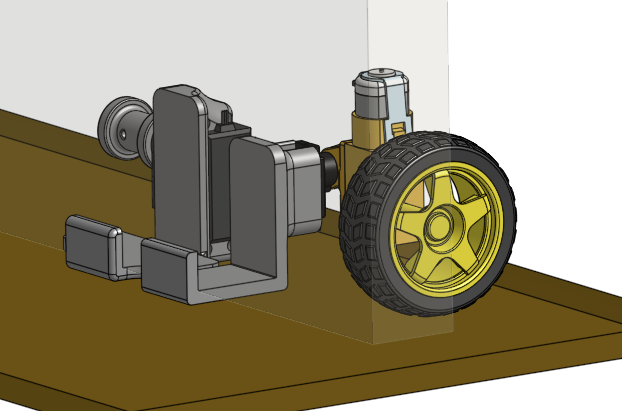
Lifting of the drive wheel:
You may wonder why the wheel is lifted at an angle when it stops moving. This is because when the door is not opening to the device, the wheel would roll on the floor when being manually opened. This is bad for two reasons. The first is that the wheel would drive the motor, generating current and potentially back powering the Arduino, which could fry it. Secondly, I still want to be able to open my door without the need for the device. Thus the wheel rolling on the ground would slow down the door being opened. Therefore, I made the design choice of lifting the wheel off the ground with a servo motor.
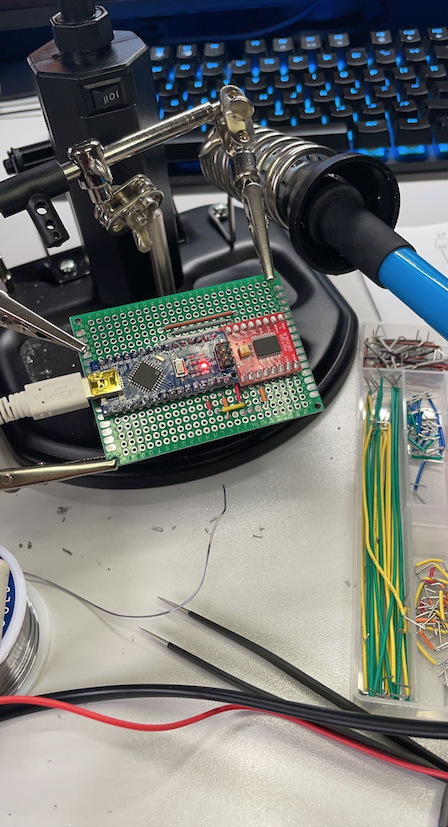
IR Remote:
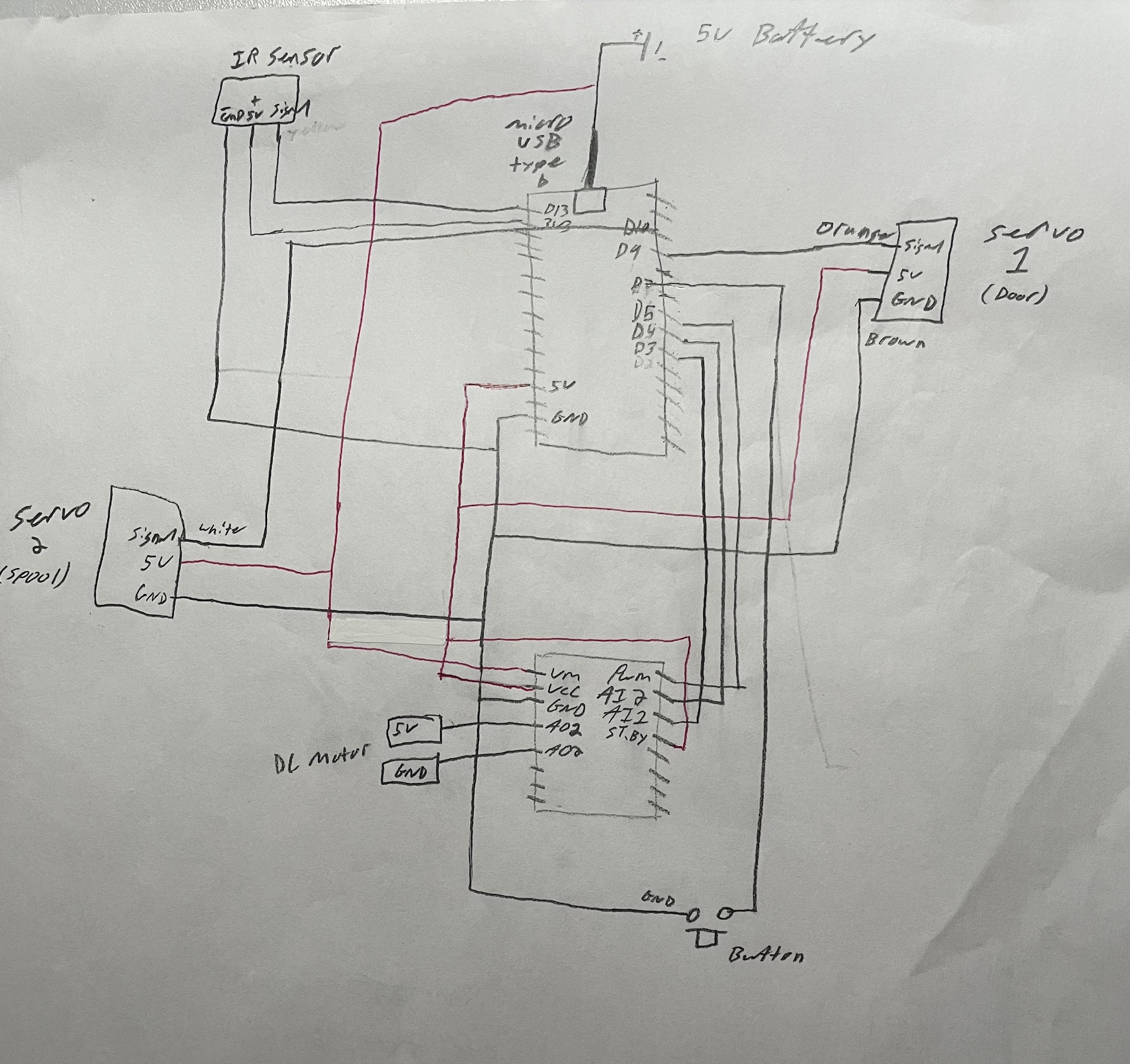
The device uses an IR remote and sensor to control.
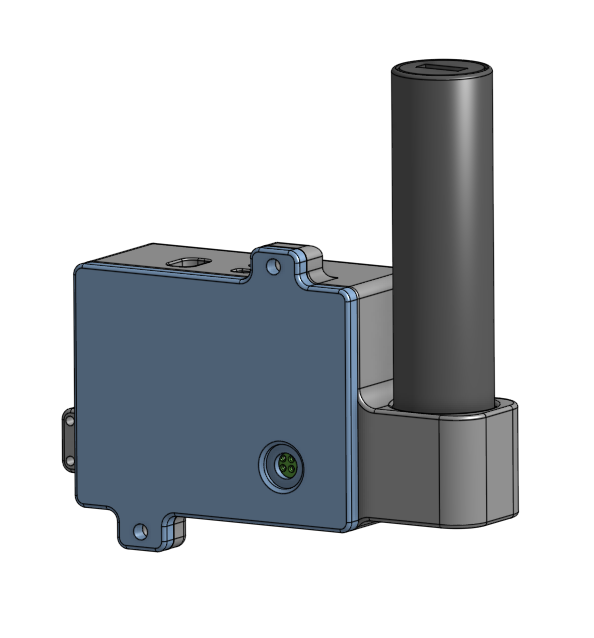
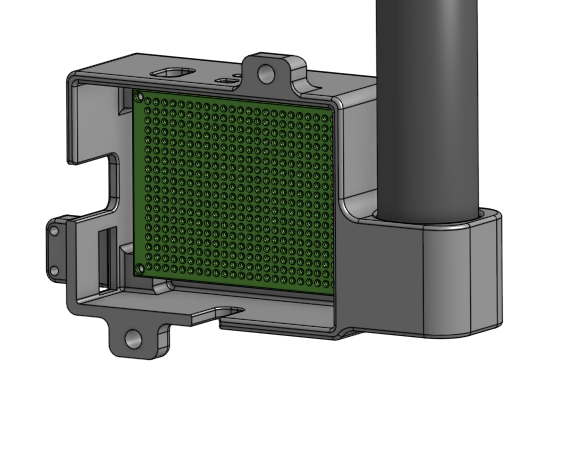
All electronic components are then fed into a main electronic housing. This project is powered by an Arduino nano attached to a protoboard.
Door Mounts:
All parts/mounts of this design were made in a way where it did not permanently attach to or damage the door in any way. The main housing used velcro to mount on the door (this way, it could be easily removed if further work was needed).
The motor mounts slide onto the underside of the door and fit by tight tolerance to hold it in place.
Code
//By Matteo Fazio 2022
#include <Servo.h>
#include <IRremote.h>
#define RECEIVER_PIN 12
IRrecv receiver(RECEIVER_PIN); // create a receiver object of the IRrecv class
decode_results results; // create a results object of the decode_results class
unsigned long key_value = 0; // variable to store the pressed key value
// Motor A
int pwmA = 5;
int in1A = 3;
int in2A = 4;
// Motor Speed Values - Start at zero
int MotorSpeed1 = 0;
Servo servoWheel;
Servo servoSpool;
int servo_position = 0;
int button = 8;
void setup() {
Serial.begin(9600);
CLKPR = 0x00; //set power to normal useage
servoWheel.attach (9);
servoSpool.attach (10);
servoWheel.write(servo_position);
receiver.enableIRIn(); // enable the receiver
receiver.blink13(true); // enable blinking of the built-in LED when an IR
//for motor controller
pinMode (pwmA, OUTPUT);
pinMode (in1A, OUTPUT);
pinMode (in2A, OUTPUT);
pinMode(button, INPUT_PULLUP);
liftWheel();
}
void doorLatchOpen(){
//turn the door knob open
servoSpool.attach (10);
servoSpool.write(180);
delay(4500);
servoSpool.detach();
}
void doorLatchClose(){
//turn the door knob closed
servoSpool.attach (10);
servoSpool.write(0);
delay(4100);
servoSpool.detach();
}
void forward(){ //to close door when open
MotorSpeed1 = 255;
digitalWrite(pwmA, MotorSpeed1);
digitalWrite(in1A, LOW);
digitalWrite(in2A, HIGH);
delay(500); //drives door to door latch
doorLatchOpen();
delay(1300); //wait till door is in closed postion
MotorSpeed1 = 0;
digitalWrite(pwmA, MotorSpeed1);
doorLatchClose();
}
void backwards(){ //to open door when closed
doorLatchOpen();
delay(1000); //wait till latch is open
MotorSpeed1 = 200;
digitalWrite(pwmA, MotorSpeed1);
digitalWrite(in1A, HIGH);
digitalWrite(in2A, LOW);
delay(1300); // wait till door has cleared latch postion
doorLatchClose();
//delay(100); //drive till door is fully opened
MotorSpeed1 = 0;
digitalWrite(pwmA, MotorSpeed1);
}
void liftWheel(){
servoWheel.attach (9);
for (servo_position=33; servo_position >=0; servo_position -=1){
delay(8);
servoWheel.write(servo_position);
}
}
void lowerWheel(){
servoWheel.attach (9);
for (servo_position = 0; servo_position <= 44; servo_position +=1 ){ //pin 9 for yellow, middle is 5v, black or brown is ground
delay(8);
servoWheel.write(servo_position);
}
}
void backwardsPartOpen(){ //to open door when latched isnt closed
MotorSpeed1 = 255;
digitalWrite(pwmA, MotorSpeed1);
digitalWrite(in1A, HIGH);
digitalWrite(in2A, LOW);
delay(3000); // wait till door has finshed moving
MotorSpeed1 = 0;
digitalWrite(pwmA, MotorSpeed1);
}
void forwardPartClosed(){ //to close door but not latch (partly Opened)
MotorSpeed1 = 255;
digitalWrite(pwmA, MotorSpeed1);
digitalWrite(in1A, LOW);
digitalWrite(in2A, HIGH);
delay(3000); // wait till door has finshed moving
MotorSpeed1 = 0;
digitalWrite(pwmA, MotorSpeed1);
}
void loop() { //main
//turn off motor to stop power draw
digitalWrite(in1A, LOW);
digitalWrite(in2A, LOW);
servoSpool.detach();
servoWheel.detach();
CLKPR = 0x04;
//Activate using button
if(digitalRead(button) == LOW){
CLKPR = 0x00; //set power to normal useage
//open door
Serial.println("Openning (Manual)");
lowerWheel();
backwards();
delay(5000);
//closedoor
Serial.println("Closing (Manual)");
forward();
liftWheel();
}
if (receiver.decode (&results)) { //if we have received an IR signal
//Serial.println (results.value, HEX); //display HEX results |
CLKPR = 0x00; //set power to normal useage
if (results.value == 0xFFFFFFFF) {
results.value = key_value; // set the value to the key value
Serial.println(key_value);
}
switch (results.value) { // compare the value to the following cases
case 0xFF10EF:
Serial.println("|<<"); //close door, when open
Serial.println("Closing");
lowerWheel();
forward();
liftWheel();
break;
case 0xFF5AA5:
Serial.println(">>|"); // open door, when closed
Serial.println("Openning");
lowerWheel();
backwards();
liftWheel();
break ;
case 0xFF4AB5:
Serial.println("UpButton|"); // open door, without latching
lowerWheel();
forwardPartClosed();
liftWheel();
break ;
case 0xFF18E7:
Serial.println("DownButton|"); // close door, without latch to open
lowerWheel();
backwardsPartOpen();
liftWheel();
break ;
case 0xFF38C7: // "OK" button, open and close
Serial.println("Openning");
lowerWheel();
backwards();
delay(5000);
Serial.println("Closing");
forward();
liftWheel();
break;
case 0xFF6897: //Star Button '*'
Serial.println("Wheel Lifted");
liftWheel();
break;
}
key_value = results.value; // store the value as key_value
receiver.resume(); // reset the receiver for the next code
}
//turn off motor
digitalWrite(in1A, LOW);
digitalWrite(in2A, LOW);
CLKPR = 0x04; //reduce power when not being used
}
This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
