Saturday, 15:08, 26/11/2022 - This is a bad idea.
"Why a human-sized mech, and not a exoskeleton?"
Well... Sigh...
Because the biggest limiting factor of any exoskeleton/power-armor/exosuit is the squishy meaty "pilot" inside of it.
The machine needs to be super precise and well thought in order to not break any bones or cause other injuries to the "pilot" (like "that scene" from Metal Gear 5).
And so, it will be safer to be inside a compartment inside a mech rather than working along it (or outside of it).
The closest thing I could find to what I'm thinking about are the exoframes from the Anime "Obsolete", they seem to me pretty realistic in their design, even thought they just use space technology to justify how these work.
What I mean is: if humanoid mechs were a thing, they would look like the ones in obsolete.
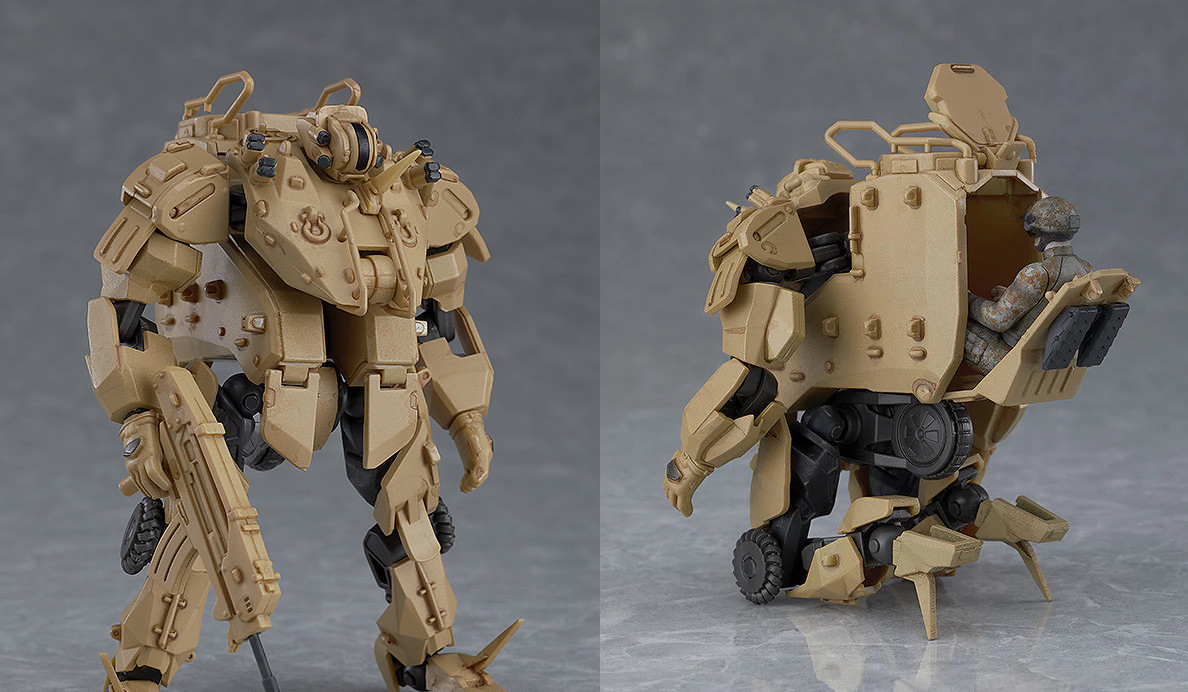
Although I think these are too tall, a mech should be at extra-maximum, 2 meters tall.
"So, what will make it move? Artificial muscles?"
Let's keep something clear, there certainly is some kind of super material artificial muscle that allows for high efficiency, control and power, but I'm only talking about commercially available options. Something I can either buy online or make at home.
(In my fecal opinion) The 3 most essential things about robots are the energy source, the actuator and the controls. So, the "food", the "muscle" and the "brain".
The energy source more accessible today can be either electricity or fuel (that is normally converted to electricity through a generator), the controls are normally the hardware (processing units/motherboards), the software (the programs that control the actuation) and the feedback loop systems (like the encoders), and the actuators are... Well... Sigh...²
The actuators are the parts of a machine that make them work, electric motors, pneumatic/hydraulic cylindric actuators etc.
Of course, if you have the minimum interest on actuators, robots and so on, you have probably either heard of festo fluidic actuators and that youtube channel called "Clone".
And as put into perfect words in this stack exchange question:
"Why aren't pneumatic/hydraulic artificial muscle actuated humanoid robots more common?"
As cool as they seem, fluidic muscles like these are, unfortunately, not on track to be viable for mobile robotics for the foreseeable future. There are 3 primary issues:
1- Controls. It's somewhat easy to turn them on or off with solenoid valves, but a humanoid robot needs high precision to walk and manipulate objects beyond just on or off. And it turns out that actuating these fluidic muscles usefully is extremely challenging.
2- Cost. It's true that the actuators themselves are cheap tubes but the rest of the system is very expensive. You need a high power compressor to pressurise the working fluid, pressure accumulators to smooth out high demand draws and accumulate expended working fluid to feed the pump, fluid distribution manifolds, pressure sensors, and most expensive of all, the pressure control valves.
3- Mechanical inefficiency. Regardless of the previous issues, this by itself is basically a dealbreaker for practical mobile robotics applications. Hydraulic systems are generally a little better than pneumatic, but given the large stack of components and high number of moving parts needed to implement these systems the total electrical efficiency is far below electric motors. While brushless motors with gearboxes can achieve >90% efficiency pneumatic systems are only ~10-20%, maybe up to 30% if you have really high quality (aka expensive) parts.
(they explain in much more detail in their answer, check it)
And Vacuum Artificial muscles face the same problems.
Needless to say, these things didn't stop me from thinking on possible solutions.
For example, instead of simply relying on expensive gradual valves, one could make a system where before of each muscle you would have a chamber with the minimum amount of pressure one would want in a muscle, so you can gradually fill up the muscles by opening and closing the valves to this extra chamber.
Or even multiple chambers with different volumes and pressures that could be opened in different sequences in order to actuate the muscles in a certain way.
Maybe if you put a rotation locking mechanism in the limb you're trying to move (something that locks the arm in a certain position, so the muscles don't overactuate it), you would be able to make precise movements. But you sure would be wasting some energy and at the risk of breaking the locking mechanism every time you move.
But even then, you would almost double the amount of solenoid valves.
I tried to think on the amount of solenoid valves required to move a robot, the bare minimum actually.
So, if you don't follow perfectly the human anatomy and decide to take some liberties on design it, you would need:
- 4 artificial muscles for each finger, totalling 20 muscles in a single hand. 40 muscles in total with both hands.
- Since every muscle need a input and output solenoid valve, you would already need 80 solenoid valves.
- 6 muscles for each shoulder (assuming you're using a Stewart Platform, a parallel manipulator mechanism), 12 in total = 24 solenoids.
- 2 muscles on the arm, 2 more in the forearm and another 6 on the wrists on each side, 20 in total = 40 solenoids.
- 4 in each hip to move the thigh/femur, 8 in total = 16 solenoids.
- 2 muscles on the thighs, 2 on the legs, 6 in the ankle and 2 more on the tip of the feet on each side, 24 in total = 48 solenoids.
- 208 solenoid valves in total, each solenoid weights around 100 grams, so 20,8 Kg in total.
So, if it is this heavy with "just" 104 muscles, imagine increasing the quantity of muscles or valves...
Also, a detail: I didn't add the muscles for the torso and neck movement, so this would have a "brick-torso" just like Atlas robot from Boston Dynamics.

And I say that, because the weight of the valve depends heavily on the pressure and type you're using, they can weight way less if you're using lower pressures. And normally pneumatic/hydraulic artificial muscles work with 4mPa (which is the pressure the Festo muscles normally are rated), and there are other types that need other amounts of pressures.
And there are certain types of solenoid valves that allows for multiple actions in the same space (the 3/2 way), like letting the pressure in and out, so reducing the amount of valves required, but still is a lot of valves to take care of.
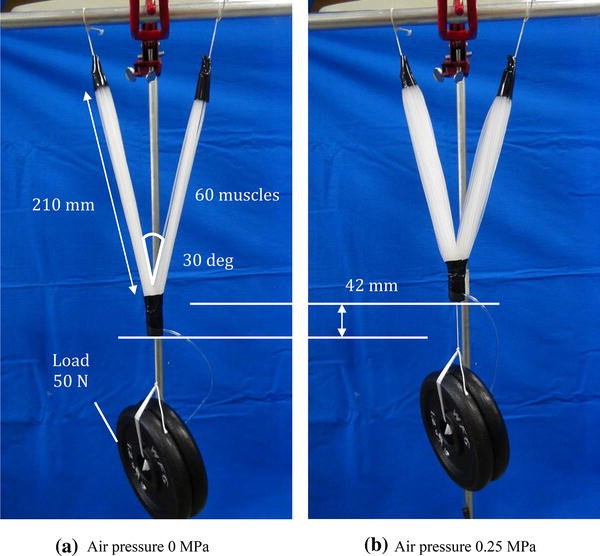
And one example is the multifillament pneumatic muscles:
These muscles only use 0,25 mPa to lift 5kg, which is just 36 PSi (2,4 bars), a cheap air compressor used to fill up tires and party balloons can easily provide that, in fact, they can achieve 300 PSI. And looking at their article, it seems that increasing the number of filament muscles will decrease the amount of pressure required.
 But, again, you would need hundreds, if not thousands, of solenoid valves (even if you use a single valve for a lot of them)
But, again, you would need hundreds, if not thousands, of solenoid valves (even if you use a single valve for a lot of them)
Maybe my math is bad, maybe I don't know enough about the subject to circumvent the solenoid problem, but hey, I tried to look around, and I couldn't find an answer.
There is also combustion driven soft actuators/artificial muscles, which is basically pneumatic artificial muscles, but "spicy".
They normally work by the ignition of flammable/explosive liquids and/or gases inside a malleable chamber (like shown above).
Needless to say, this is incredible dangerous to mess with, and in order to just keep a muscle actuated, you would need to constantly combust fuel.
And you would still need solenoid valves to spread the fuel and expel the post-combustion gases.
Speaking of explosion-based artificial muscles, once I had an idea for a steam condensation artificial muscle. Basically, an implosion artificial muscle.
Basically, if you fill a tank with steam/water vapour and them spills liquid water/cool water on it, it condenses the steam; And since steam occupies more space than air, when it condenses, it creates vacuum. How cool is that?!
But, the solenoid valve and control problem lingers: how you would contract this muscle fast enough with enough control?
You first need to fill it up with steam (that is dangerously hot), pray it doesn't cool down naturally, contracting without your direct command and then need to empty the water from its inside so you could fill it again.
It is easier to just fill it with air... ¬ ¬
"Welp, so pneumatic/hydraulic/vacuum artificial muscles are a no-go. So what now?"
If you are quite a robot nerd like me, you've probably heard of Nylon/Polyethylene shape memory polymer (SMP) and Nitinol shape memory alloys (SMA) artificial muscles:
The problem with these muscles is the same as the pneumatic ones: control (and price).
Nitinol is made of Nickel and Titanium, so... Expensive as heck (for me, brazilian, dunno about your country).
You can't control exactly where these muscles are because they move by heat that is generated by electricity. And one thing that people kinda don't talk about is the heating element.
Induction heat needs voltages in the range of 3000 volts (the voltage on utility poles is 13k [13000]) with a high amount of amperes.
Resistive heating is basically what happens when you pass a current through a material with high electric resistance (something that is bad at conducting electricity): the electricity is directly transformed into heat.
And normally the videos about nylon artificial muscles use nichrome or kanthal wire as the heating element, but the problem is that these resistive heating elements are meant to heat stuff to thousands of degrees, and these shape memory polymers/alloys only work at pretty small differences in temperature.
For example, Nylon and Polyethylene contract to a maximum 130-180 ºC (266-356 ºF) from room temperature, with is just a difference between ±100 degrees.
And due to Nichrome and Kanthal nature's, the resistance of its material increases as hot as they get, that's why they are used as resistive heating elements.
So you pass a X voltage with Y amperage to heat the element that will heat the nylon (that is submerged in liquid) to Z degrees, but the volt/ampere changes, so instead of heating it by 1 ºC, you can accidentally heat it by 10 ºC and melt the entire thing.
And even if you take weeks to carefully measure all the differences in resistance, how you will un-actuate these muscles?
They have to naturally cool down by either being constantly submerged in cooling liquid, or by being sprayed with liquid.
Yes, you could make a cooling system with a water pump and solenoid valves, but at this rate, what is the point?! You would still need the 208 solenoid valves (or more).
And yes, someone did that (as shown in the video above), they control the flow of hot and cold water on Nitinol SMA artificial muscles so they can carefully control the actuation process. You could slowly allow the flow of hot/cold water to contract/relax the muscle.
You can read more about this system in specific on their website.
In order to make a "good" artificial muscle (good is relative to what you need it, in my case, for a mech), you would need to have full control of its actuation. Just like you have full control of an electric motor rotation.
"So screw it! Let's go full electric for full control! Right?"
About that... Well... Sigh...
 There are dielectric elastomers artificial muscles, that come in a variety of shape and forms with multiple propositions for actuation.
There are dielectric elastomers artificial muscles, that come in a variety of shape and forms with multiple propositions for actuation.
So... What is the problem?
The problem is that in order to achieve such fast and precise actuation, you need 5000 volts (10Kv) or more.
Simply because of the method of its actuation:
they literally electromagnetically attract two super ultra thin layers of conductive ink to each other in order to simulate a muscular contraction.
Ok, I was reading more about HASEL muscles in this paper and it is said that they need 5000 volts and 1,1 miliamps (that is 0,0011 amps, and since current is Volt times Ampere, this only uses 5,5 Watt of energy.
A static electric shock achieves 20000 volts, but extremely low amperage, that's why you don't turn into charcoal.
The voltage really does scare me, but I may reconsider it with this simple and cheap artificial muscle.
Now the only problem is find out how many of these do I need to lift 1 kg.
"So... At this point, why not just use two electromagnets?"
Well...
How does electromagnet work?
With a spiral of electrically conductive material (such as copper) around a ferromagnetic core (electromagnets don't need cores, but they can become stronger with them).
And what that is called?
... A solenoid.

I avoided solenoids so much, but it all goes back to them.
The good news is that solenoids by themselves are really cheap, since they don't need to withstand hundreds of PSI whithout breaking, unlike the solenoid valves.
They normally work by a distance of 10 mm (1cm) with around 10 newtons of force, which is 1Kg.
In the video itself the guy doesn't tells the specifications of the solenoids he used, however, in earlier videos, it is shown the artificial muscle without the tape, showing that these are like, 12-24V solenoid valves.
Well... The problem is that as shown in the solenoid descriptions themselves, the 1Kg of force is only applied when the ferromagnetic core (its pin) is completely in the centre of the solenoid, the lifting force is minimal (something around 0,8 newtons of pulling force, almost 10 times less than what you need).
There are electromagnets that can lift 100 kg or so, but these are for contact locking, not attraction. if the target is centimetres away, they are almost useless.

Maybe you could use those pancake-shaped coils instead of solenoids and dieletric elastomers, but I don't know if these as common to find or if they are good at electromagnetic attraction (and so, running in the same problem as before).
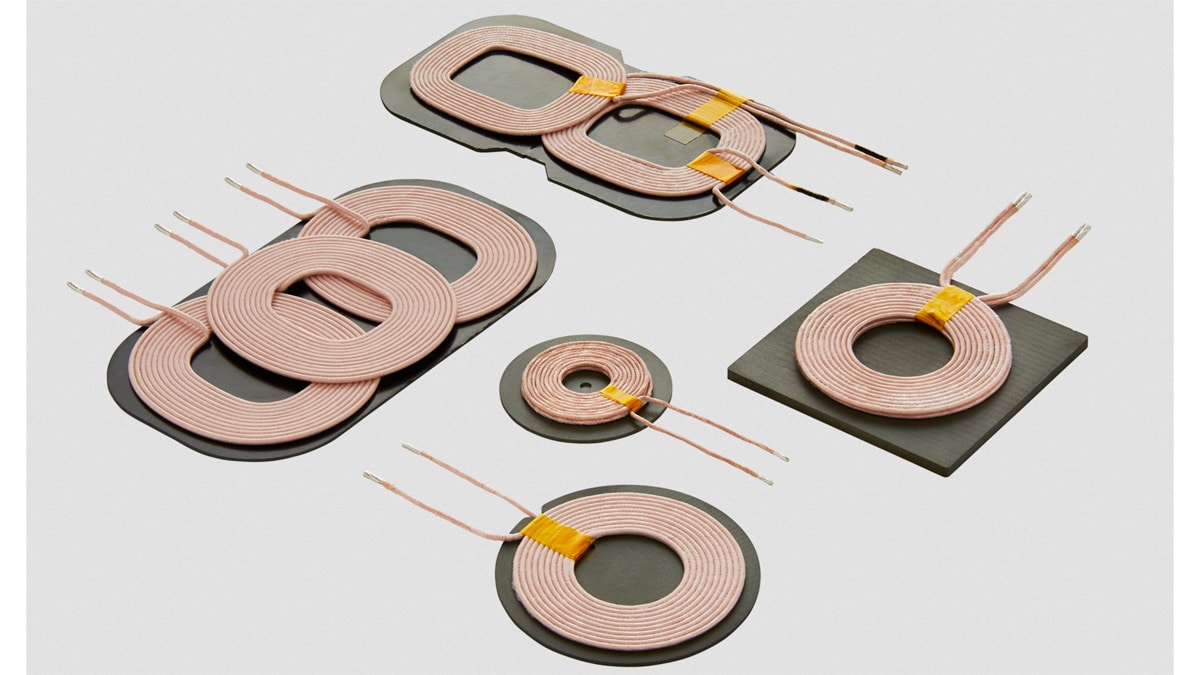 These are used for wireless battery recharging devices, by the way.
These are used for wireless battery recharging devices, by the way.But wait, there are other interesting alternatives.
For example:
Linear Voice Coil actuators/motors:
These work just like the speakers, and since they have "voice coils" in the name, I can assume these are used for super ultra loud speakers.
Electromagnetic linear motors:
These are the equivalent of a brushless electric motor, I think.
But still, these are heavy and quite solid, if you were to use these as electromagnetic actuators, you could easily position it, but they wouldn't be safer to be around.
You could use malleable materials, like the copper wire by itself (also called as "air core coil") covered in heating dissipating silicon rubber, for example. But at the cost of efficiency, since the metal core is there for a reason.
Just like this post on Hackaday, where they used metal springs and a stator to move it around.
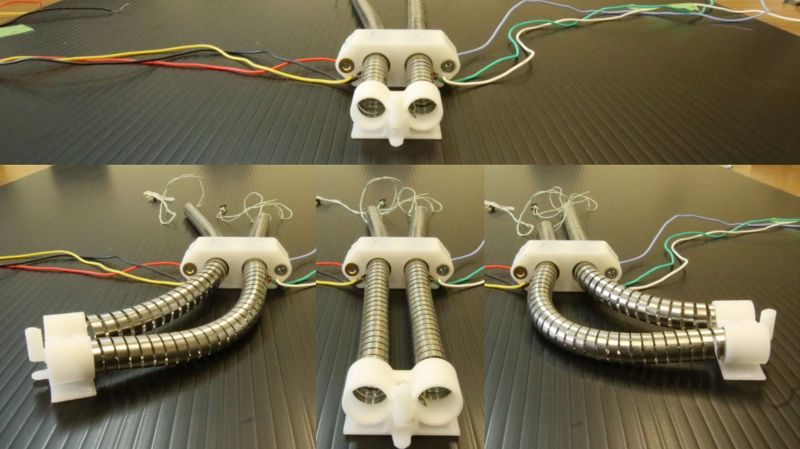
Even so, these are in my number 2 of "favourite" options. Specially since you could both use the pulling force and the pushing force on the opposite sides of the part you're trying to actuate. "Number 2" because I would need to wire everything by myself.
The problem is that I don't know how strong they are or how much I would need to increase its size and power consumption in order to lift a certain amount of weight (let's say, 1kg).
A bit of a tangent here, but...
Also, you could use laser-induced graphene to make the wires.
Laser induced graphene is just a porous type of graphene that is formed about shinning lasers on certain carbon-based materials, such as Kapton tape and even wood.
They normally have a lot of electric resistance (which make them a low voltage heater, good for heat operated artificial muscles, if you have the patience to laser an entire roll of this tape), but if you use the right parameters (such as lasering the same spots for longer and with more powerful lasers), you could have a ultra low electrical resistance (0.30 Ω/sq), better than silver itself (1.6 × 10−8 Ωm).
I found this value on this article (paywalled, you could use sci-hub to read it) about the production of conducting Laser Induced Graphene, but they used some expensive materials to achieve that, such as a 30W fricking CO2 laser shooting a mix of Polyetherimide and Polyimide 3d printing filament.
If someone achieved that with regular Kapton tape and a cheap 400nm laser (like in the video above), for christ sake just tell me how.
I also found this paper about a bio-inspired linear actuator artificial muscle just like what I was kinda proposing, and just now it came to me that you don't really need to wind everything by hand, you could contact a PCB supplier and ask for multilayer and flexible PCBs with the stator already printed high the highest of precisions.
Just like people are doing to axial flux electric motor stators:

This guy makes a lot of flexible pcb devices on his channel.
"So, what is the "great" favourite option 1?"
Well, you will call me super stupid, but this:
Yes. Just cheap micro servo motors pulling cables.
 And to worse it even more: the idea is to simply attach the servo motor to a cable and the output shaft (the part that rotates) to another cable, when it is turned on, it will pull the cable, just like an artificial muscle.
And to worse it even more: the idea is to simply attach the servo motor to a cable and the output shaft (the part that rotates) to another cable, when it is turned on, it will pull the cable, just like an artificial muscle.
Cable-driven robots are nothing new, there are a lot of them, actually. Not quite like I'm suggesting, though.
Then, again, this is my """favourite""" option because micro servo motors, or just electric motors in general come already built, with specific specifications and specific parameters, with predictable results and predictable ways of operating.
Unlike a DIY electromagnetic flexible linear motor artificial muscle (what a mouthful), I know how much force this applies, and I can buy thousands of micro servos directly from a supplier instead of making every single one of them by hand.
And if you don't know about it, when you buy an amount above hundreds or thousands of units, the price per unit decreases. So a micro servo motor can cost around 5-10 bucks on an online shopping, but if you buy directly from a supplier, the unit will cost cents.
Obviously, I don't really need an actual micro servo motor, because these have an encoder and have something around 120 revolutions per minute, while I need something around 200 revolutions per minute (around 3-4 revolutions per second) for something to move at same speed as a human body (I think).
But even then, I don't know just yet if this is the "best" worst option.
Simply because efficiency increases by size, so even if I order 100 micro electric motors costing 1 dollar to 50 cents per unit, I would be basically paying 1 dollar per kilogram (since these can lift 1,6kg at the shaft), so, 100 motors = 100kg (more or less); And those 100 micro servos would be sucking 6 volts and 0,20 ampere each, while the bigger stepper motor would consume the same amount of electricity as a single micro servo (I think).
A stepper motor that can lift 100kg at its shaft can range around 100 dollars or less (I think), so I could be just be paying for a single bigger motor instead of thousands of them (that would need to be wired).
And if I would fill the mech's body with big and chonky electric motors, then why not put them in the hinges, just like any conventional humanoid robot?
Not to mention the total cost:
Yes, it costs cents per unit, but I still need to give thousands of dollars in advance instead of buying them little by little. Unlike the copper coil linear motors, which I could just pay around a dozen bucks per kilogram of copper wire.
I'm divided by these two, but if I can't find a way of designing and projecting the electromagnetic linear motor artificial muscle (ELMAM for short, because, my god), I will have to abide to the thousands of micro servo motors.

Also, an extra tangent here...
One day I was thinking on how an exoskeleton/power armor/exosuit could be highly efficiency with the least amount of moving parts, and my "conclusion" (more like an crappy opinion) is that we should completly throw in the trash the idea of actuators around the body, arms, legs and stuff.
One or two electric motors would rotate a fan (like the one in a turbocharger) in order to produce a coanda effect around the torso of the "pilot" and lift something around 90% of its weight. So the "pilot" would be able to jump higher, run faster and carry more weight without the need of a super heavy exoskeleton/mech that could snap their spine in half.
The closest example I can think of are bladeless fans, like the Dyson ones shown below.
In fact, I saw this question once on stack exchange, and if you did that (lift 90% of your weight), you would be able to jump 4 meters into the air (more or less two times the height of that mech in the beginning).
I know that lifting a percentage of the body is counter-intuitive, since you could simply fly. But maintaining flight requires a LOT of energy. Specially if you have tiny blades, that's why air planes have wings and helicopters have long rotors.
Those drone electric motors need powers around the 5 kilovolts with 1 or more amperage (so, thousands of watts) of energy to work, and they can only fly for a few minutes.
It would be easier to control, cheaper to build and simple to operate.
The turbocharger fans are smaller than the average VTOL "drone" pack that you normally see and is readly available anywhere in the world. Not to mention that it is more compact and already has explicit specifications on power, pressure, rotations, thrust, etc.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Wow, that was a treasure trove of knowledge.
I'd like to note that copper has an Ω/sq that's usually in the micro-ohm range (for PCBs) and silver has a higher electrical conductivity, so I doubt the graphine at 0.30 Ω/sq exceeds silver but I don't know the thickness used to get this value.
Are you sure? yes | no
Thanks :)
Also, I think you're right, I said that without thinking about it, I'm mostly certainly wrong.
Are you sure? yes | no