It is Wednesday my dudes, 19:44, 15/02/2023
So... Since I spent the last month doing absolutely nothing because of my ADHD, I would like to just... Check the list and at least do something.
So, just like in Project Log 5, here are the objectives:
1- The skeleton, the actuators, the system and the power supply need to be simple and cheap enough in order to be bought locally or made at home.
2- The full mech needs to be able to lift at least 1000 Kg of weight either on the hands or in the shoulders. This does not include its own weight and the weight of pilot, which can shift the weight demand to higher numbers. So let's keep with 1,5 to 2 tons in total.
3- It is only possible to calculate the amount of muscles needed if there is a skeleton designed to support all this weight.
4- After designing the skeleton, it will be time to design the actuators.
5- And by measuring the amount of energy that it requires to lift a certain amount of weight, just then it will be possible to design the power supply.
6- If the power supply can't power the entire body in a practical way, then it will be useless.
7- If all the previous steps are done without trouble, it will be required to research and add the sensors to the design in order to be able to control it.
8- After everything is designed, then it is time to build.
- 1- The skeleton, the actuators, the system and the power supply need to be simple and cheap enough in order to be bought locally or made at home.
I think this is done, right?
The idea is to use steel cables to make the braided expandable sleeve of the McKibben actuator, either by using kinitting techniques or chinese finger trap.
The bladder will be two layers of different materials, one layer of extremely fine steel mesh and the inside of that mesh, plastic.
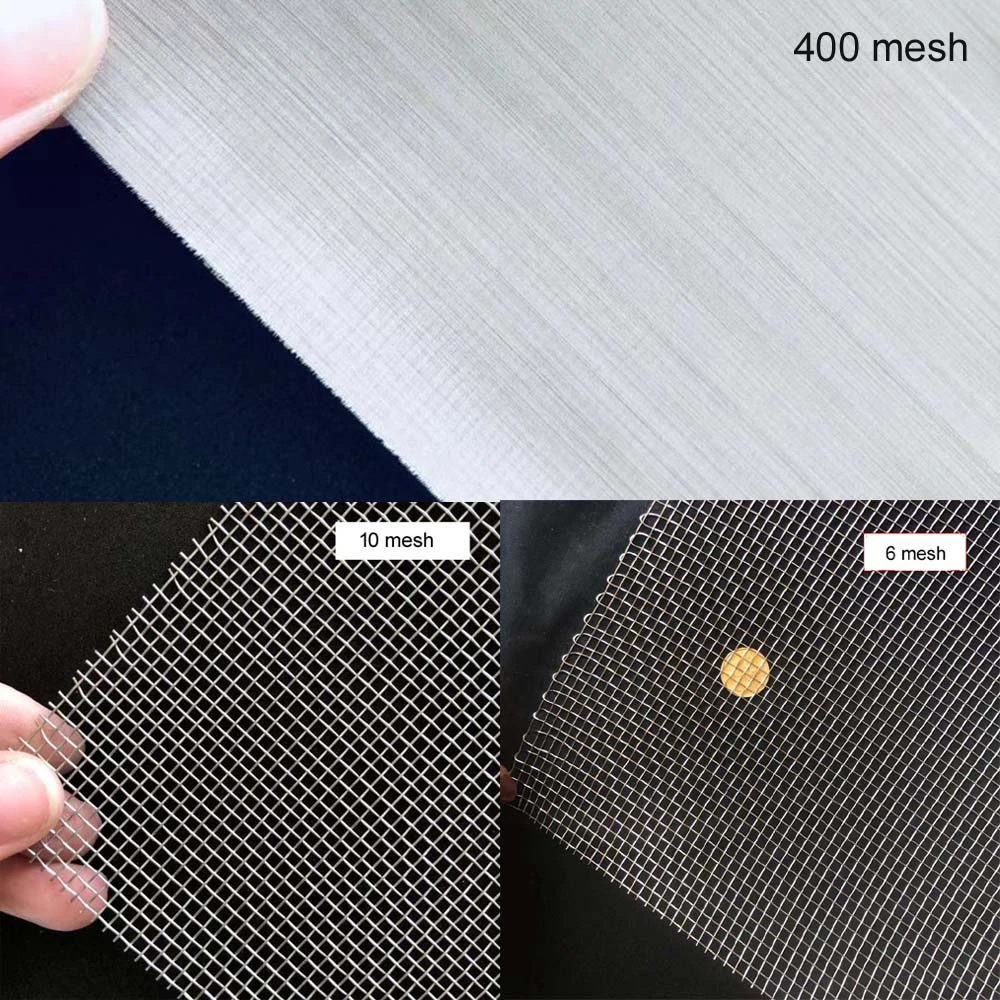
This is needed because the steel cables will leave a lot of space between them, and so, if a conventional bladder where to be used, it would rub against the steel cables and be teared.
The ideal solution wold be to use the finger trap, but I don't know how to make it out of steel mesh without tearing it apart.
- 2- The full mech needs to be able to lift at least 1000 Kg of weight either on the hands or in the shoulders. This does not include its own weight and the weight of pilot, which can shift the weight demand to higher numbers. So let's keep with 1,5 to 2 tons in total.
Each muscle can lift 5 tons, so this is super ultra redundant.
Although now that I think about it, It feels a bit too redundant, it actually feels like it is overkill.
- 3- It is only possible to calculate the amount of muscles needed if there is a skeleton designed to support all this weight.
- 4- After designing the skeleton, it will be time to design the actuators.
Now that I'm reading this, this really seems organized in a wacky way.
But yes, I did design the skeleton and the actuators.
- 5- And by measuring the amount of energy that it requires to lift a certain amount of weight, just then it will be possible to design the power supply.
- 6- If the power supply can't power the entire body in a practical way, then it will be useless.
Done and done, it will need a couple of batteries.
Exactly a 1-3 hp electric motor and 3000 watts per hour at full trottle, which wouldn't happen.
- 7- If all the previous steps are done without trouble, it will be required to research and add the sensors to the design in order to be able to control it.
I kinda figured out that I could just use sensors without much trouble.
The PROBLEM is that I don't know how to make a basic program.
Basically, if a sensor detects X value that the pilot applies to it, it should make the hydraulic pump to work Y amount of energy and the progressive valve to open Z amount of percentage.
But how to write a code to it?
I kinda opened a bunch of arduino tutorials and all this time I couldn't make myself to write the damn program.
But as much as I know mechs are overexagerated to be super duper complex, this system is really simple and easy to use.
And I want to finish this project in order to test that.
By the way, I could just switch back to servo valves:
Which are simpler (or not).
Of course, this kind of valve is quite slow, but I can just use a different kind of motor, like stepper motors.
Also, I saw this tutorial, that makes me remember about the lucidgloves for VR, but it is way simpler.

Also, I don't actually need to move inside of it (the mech) in a "motion capture capsule" like in Avatar movie (the blue one), no matter how padded the inside of the Mech's cockpit is, I still can move a little bit.
So I could just keep using the potentiometers and the amount the limbs will move are simply the speed in which I move my arm.
So, if I were to lift my forearm/biceps, in the cockpit I will continiously pressing the potentiometer for the forearm/biceps, which will make the forearm continiously move.
The speed in which the arm would move is the speed in which I actuate the potentiometer, and if I don't move more, the potentiometer will also not be actuate.
However, If I were to actuate once and change the speed in mid-movement, the potentiometer wouldn't be able to detect it, because you already moved to the maximum limit.
A way of going around that is by stopping mid-movement and then changing the speed of actuation again, which can be annoying and counter-intuitive.
Also, the tesla turbine can also be used as a pump for particularly viscous fluids. And it is pretty simple and easy to build.
Which would be cheaper and maybe require less energy or torque to pump up the magnetisable hydraulic fluid I'm going to use.
- 8- After everything is designed, then it is time to build.
So, let's not get ahead of ourselves.
I'm going to build a smaller 3D printed version of this thing, if everything goes A ok, I will try to make the real scale thing.
The problem is that I am so damn broke I can't even do that at the moment.
I do have a 3D printer with a single filament roll, but I don't have the money for the sensors, pump and so on.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.