17/04/2023, Monday, 08:08
Well... Hello and good morning, I guess.
Like I said in previous Project Logs, I calculated that I would need around 6000 watts electric motors (or 8 horsepower electric motors) in order to be able to lift 1000kg of weight and 1000kg of the mech's own weight.
The problem is the same as always: money.

I simply can't find 6kw electric motors, and I can't even find any kind of electric motor that was specifically made for low rpm high torque in the area of 6kw. Only those gigantic ones that weights 2 tons.
And the problem is that I can't just take 6kw rated electric motors, just like combustion engines, I have to take motors that are a little more powerful and then use use with 6kw of power.
Simply because if I take a 6kw motor and keep using it at 6kw, it will put the motor at its limit and overheat, losing efficiency.
Every motor has a nominal working load.
But I could only find 15kw motors or above, and these cost around 4000 reais (800 dollars).

Well, this time I think it would be relevant to specifically state the name, power ratting, price and image of every motor I come accross.
This one is called "Turnigy RotoMax" and it comes in a variety of power ratings and all of the ratings are expensive as hell.
Some are just 2000 watts of power and cost thousands of brazilian bucks, some are actually 10kw or above and also costs thousands of brazilian bucks.
But depending on the place, I can find its price ranging from 2000 to 5000 reais (200 to 1000 dollars).
(funny enough, I found one with 25kw rating costing 450 dollars or 2200 reais).

While searching for high power E-motors, I come accross motor-wheels meant for electric scooters or things like that.
Those have some serious power and some serious costs.
This one in specific is 15kw of power and also costs 4k reais (800 dollars) and accordingly to the aliexpress ad, it achieves 146 kph in a e-scooter.
Well, there are a lot of other types of e-motors that I come across, and all of them look exactly the same and costs around the same amount.
I need at least 3 to 5 electric motors for each leg, so, if an actuator costs 2000 bucks, I would need 20 thousand reais to 50 thousand reais (4k dollars to 10k dollars).

Not to mention that I kinda have the intention of making "repeating" mechanism all around the mech/exosuit, so I just have to build the same thing for the arms, for the legs and for the torso.
But this would mean buying the same motor for every part of the body and jut changing its energy supply.
... Which would cost... A lot more...
So I thought on buying those smaller drone electric motors that have around 2400watts of power and "simply" stack these together in order to achieve 6000 watts.
There are a lot of different types, sizes and costs for drone motors, so I will just talk about the cheapest I found for the nicest amount of power, so to speak.

This one is called "Turnigy XK3674" and I found its ad on the website "hobbyking", it costs 189 reais (38 dollars).
This one in specific has a power rating of 2400 watts, 70 amperes, 33.6 volts (which, if multiplied by each other to find the wattage, it is actually 2300 watts) and 1650 KV (which is like 115500 rpm).
I would need 3 of these for the 6000 watts of power and it would cost 567 reais (115,47 dollars) in total for each group of actuators. Costing in total 5670 reais (1150 doolars) for all the 10 actuators on the legs...
But...
However, a subject that I was avoiding until now was precisely the reduction gearboxes that one would need to extract 18-20 rpm out of these actuators.
Using an online reduction ratio calculator, I found out that I would need around 4000:1 reduction ratio from 115k rpm to 18rpm (it actually is like, 3993:1 or something like that, just rouding the numbers).
If you put the bigger number on the input on the calculator and then a smaller number in the output, it will give a number like 0.0005:1 ratio, but since the sellers use the "100:1" ratio, you need to insert the numbers in reverse on the caculator.
And one interesting thing about gear ratios is that if you take a 100:1 gearbox output and insert on the 100:1 input, the output will be multiplied by the number of ratio reduction, so, 100x100 = 10,000 ratio.
So, in order to achieve a 4000:1 gear ratio you could take a lot of different gears ratios in order to achieve the same gear output, so, a gearbox with 40:1 gear ratio and then connect it to a 100:1 gear ratio = 4000. A 60:1 gearbox to a 60:1 gearbox, you will get around 3600:1 gear ratio.

Unfortunately, these don't really have a name, but the biggest and the most compact gear reduction ratios are achieve by planetary gearboxes meant for stepper motors.
And these are more expensive than the electric motor itself.
One of these cost 600 reais (122 dollars) and I would need 2 of these per motor...
The 3 electric motors just costs 567 reais...
There are more expensive motors than these, but let's agree here that I really doubt this little thingie would be able to have a 20,000 kgfcm and 18 rpm.
I also had the "bright" idea of using actual combustion engines attached to smaller reduction gear ratios with reverse gear, so I could make the limbs go back and forth.

These cost around the same price as the 15-25kw electric motors, and weights around 20 to 40kg.
But I quickly abandoned the idea, I don't even know how to manage the electric starting of the engines and so on...
So... What this brings us to?
Well... I had the "bright" idea of taking old/broken transformers and use the silicon steel of these things and make an electromagnet.
Transformers already are electromagnets, closed loop electromagnets in specific, so one would "just" need to open it up.
However, these have isolating laminates between the metal laminates. So I would need to go one by one taking these out.
At least the laminates are so thin that I think I can cut these with just a scissor.
Also, conventional electric motors already have laminates, not in the same level of a transformer, but they have.
The principle of laminating metal cores of electromagnets in electric motors is exactly the fact that they turn on and off really fast, which can leftover electric currents (eddy currents) on the core, which can be transformed into heat.
This guy makes an electric generator using old transformers, of course, a generator is just a reverse motor.
By the way, this is just one of the thousands of videos on youtube that say things like "DIY 5000 watts electric motor/generator", never shows the current and the voltage and makes a sketchy looking thing that probably wouldn't be able to even output 50 watts.
I would need to copy existing electric motors the best I can to achieve this 6kw electric motor.
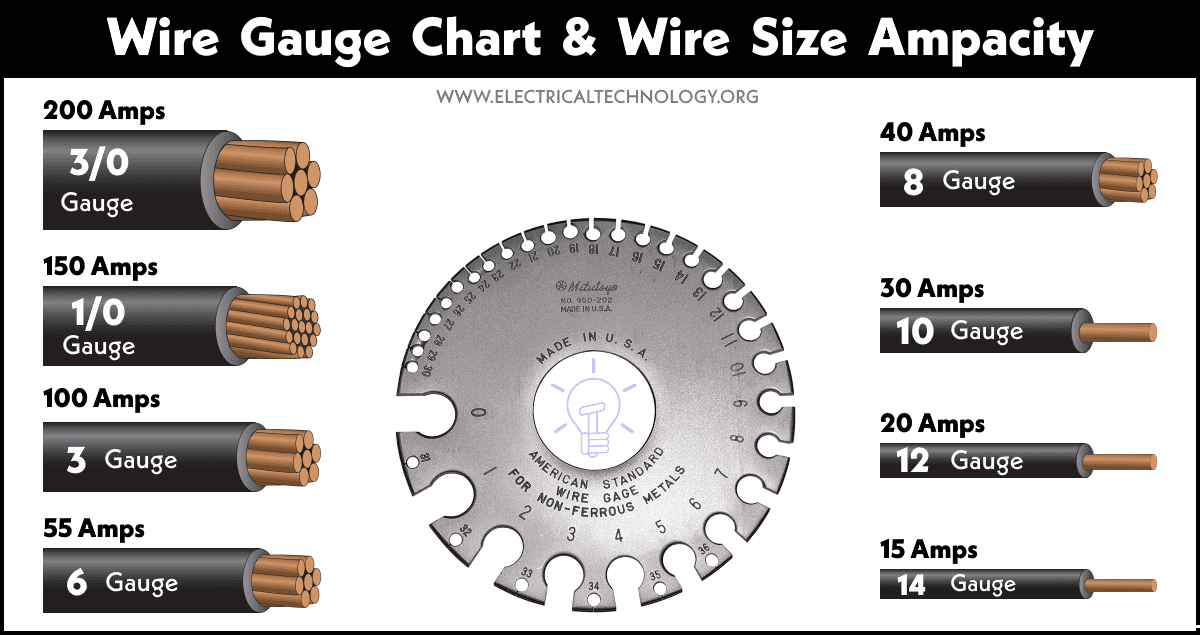
Then I would need to find out what is the best AWG/wire diameter, and then find out the best structure for the neodymium magnets or simply an electromagnet.
I would also need to find the ideal halbach array that allows for the best electric rotor.
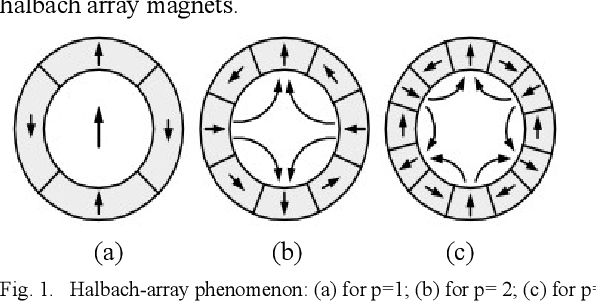
(the B type is ideal for cars, or so I heard)
And on top of all of this trouble, I need to find a way of making a generator/alternator that is compact enough.
All 40hp (24000 watts) generators are simply ginormous, but taking alternators from cars is also an alternative.
This guy stacked a bunch of alternators in order to achieve 30kw of power...
... For powering speakers...
There are some DIY videos on the subject.
Although, with such low rpms of 18 to 30 rotations per minute, I would guess that the "best" option for me would be stepper motors, but I don't think I will be able to build these. >.>
... And after all of that, I don't even know if it would be more cost-effective to simply buy the goddamn 2k electric motor. :/
It is not like there are online tutorials on how to make 30 rpm 20000kgfcm of torque electric motors out there tho...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Torque is what you need to focus on, not power. Power is torque x speed, and with limbs you usually won't get to use the full rated speed because acceleration takes time (and wastes some of your torque). On hobby motors the listed torque is usually about twice what you can use continuously.
For my designs I've been using gear ratios in the area of 30-80, but less reduction might be better. Most dynamic walking robots use 10:1 or less (although that's influenced by what you can get from single stage planetary gears). But lower reduction means heavier (and more expensive) motors. Ideal gear ratio also depends on the motor proportions. Pancake style generally has a bit higher torque to weight ratio, but a lot of inertia. Long and skinny has low inertia but less torque. I think around 2:1 stator width:length ratio is pretty close to the sweet spot. So compared to Mini Cheetah's super flat motors with I think 6:1 reduction, you could get similar response with higher reduction.
Cycloidal drive is my favorite reducer mechanism because it naturally tends toward the gear ratios I'm interested in and is relatively easy to machine, so you can integrate them into the structure of the robot and greatly reduce the weight.
Go back and re-read my comment on log #5 :) https://hackaday.io/project/188391-diy-human-sized-mech/log/213930-project-log-5-lets-list-the-objectives
Are you sure? yes | no
Yes, I know that I need to make smaller cheaper prototypes, but even then, if I don't have the option of simply using a gigantic gear reduction or a super low rpm and high torque electric motor, then what it is left of this project? :/
Are you sure? yes | no
What's left is years of educational fun building the small prototype and mid-size version with hoverboard motors.
After that you're at the mercy of whatever is available. The materials to build electric motors are expensive in small quantity. I've never even seen silicon steel sheet for sale, and even if you had some it's difficult to cut. Magnet wire costs a lot, and usually can't be reused from old motors because it's all glued together. The iron ring is hard to make unless you can buy a pipe the right diameter and cut slices off of it. And neodymium magnets are expensive.
One reason hoverboard motors are cheap is because they use relatively thick laminations (0.5mm, as opposed to 0.2mm for most multirotor motors) so it doesn't take so many layers to build up the thickness. Fine for us since we can't use high speed anyway. Even 1mm would probably be ok, especially with lower pole count so the electrical RPM is less. But mostly it's economy of scale and cheap labor in China (basically slavery). But so long as people are throwing them in the trash, we may as well make the best of it.
Are you sure? yes | no