 Cyrille Gindreau
Cyrille GindreauAt this point, we decided to abandon the concept of mirroring. If we had had a much more complex design with many more points and more than 1kb, mirroring would have saved us space. Due to having so little space however, the algorithms power wasn't able to give us the results we were looking for.
We had by this point made so many optimizations to our code that when we reverted to a single array, the total size was 902 bytes! The final program:
#include <msp430.h>
#define uint8_t unsigned char
#define uint16_t unsigned int
#define LASER BIT0
#define SSOUT P1OUT
#define SSX BIT6
#define SSY BIT7
#define length 234
void writeMCP492x(uint16_t data,uint8_t ss);
void drawLine(uint16_t, uint16_t, uint16_t, uint16_t);
int main(void) {
WDTCTL = WDTPW | WDTHOLD; // Stop watchdog timer
PM5CTL0 &= ~LOCKLPM5;//reset fram
CSCTL1 |= DCORSEL_6;//sets clock speed (16mz)
P1DIR |= BIT0 + SSX + SSY;//p1 output
P1OUT |= BIT0;//set bit 0
///////////////
///SPI Int//////
////////////////
P5SEL0 |= BIT1 + BIT2;
UCB0CTLW0 |= UCSWRST; // **Put state machine in reset**
UCB0CTLW0 |= UCMST+UCSYNC+UCCKPL+UCMSB; // 3-pin, 8-bit SPI master MSB
UCB0CTLW0 |= UCSSEL_2; // SMCLK
UCB0BR0 |= 0x01; // CLK / 1
UCB0BR1 = 0;
UCB0CTL1 &= ~UCSWRST;
//The coordinates for the laser to traverse. Even index are X values, odd index are Y values.
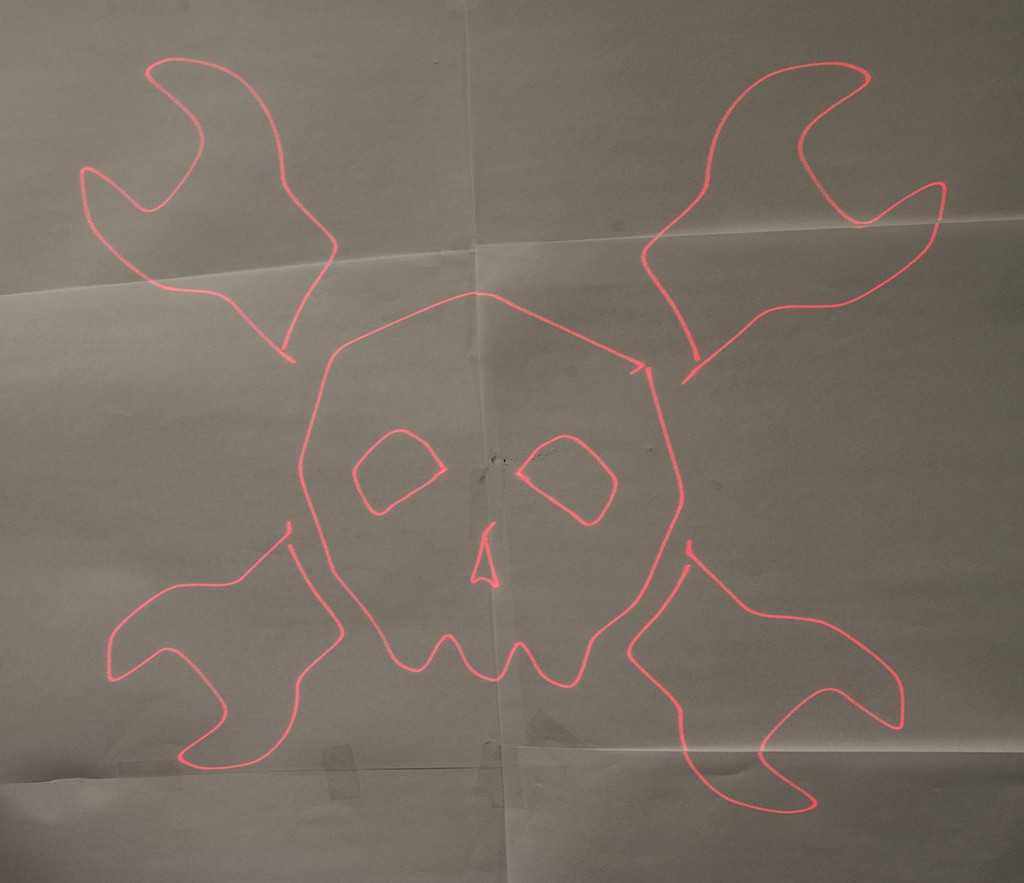
uint8_t logo[] = {66, 158, 47, 177, 37, 176, 27, 177, 16, 186, 8, 195, 8, 212, 27, 195, 47, 220, 27, 236, 40, 238, 56, 233, 66, 220, 68, 212, 68, 203, 86, 186, 75, 175, 66, 158, //lower left wrench:36
66, 98, 47, 79, 37, 80, 27, 79, 16, 70, 8, 61, 8, 44, 27, 61, 47, 36, 27, 20, 40, 18, 56, 23, 66, 36, 68, 44, 68, 53, 86, 70, 75, 81, 66, 98, //upper left wrench:36
118, 125, 110, 136, 102, 138, 86, 120, 95, 105, 97, 108, 102, 114, 110, 118, 118, 125, //left eye:18
190, 158, 209, 177, 219, 176, 229, 177, 240, 186, 248, 195, 248, 212, 229, 195, 209, 220, 229, 236, 216, 238, 200, 233, 190, 220, 188, 212, 188, 203, 170, 186, 181, 175, 190, 158,//lower right wrench:36
190, 98, 209, 79, 219, 80, 229, 79, 240, 70, 248, 61, 248, 44, 229, 61, 209, 36, 229, 20, 216, 18, 200, 23, 190, 36, 188, 44, 188, 53, 170, 70, 181, 81, 190, 98, //upper right wrench:36
138, 125, 146, 136, 154, 138, 170, 120, 161, 105, 159, 108, 154, 114, 146, 118, 138, 125,//right eye: 18
80, 159, 127, 180, 175, 159, 187, 120, 175, 84, 162, 70, 155, 55, 146, 55, 140, 70, 137, 70, 131, 55, 121, 55, 117, 70, 115, 70, 108, 55, 98, 55, 93, 74, 80, 84, 67, 120, 80, 159,//face: 40
127, 103, 130, 91, 133, 83, 127, 91, 121, 83, 125, 91, 127, 103//nose:14
};
//keeps track of where in the array we are.
uint8_t myIndex = 0;
//used for creating delays due to the difference in speed between processing and moving a mirror.
uint16_t counter;
/*
* main program loop. Iterates logo array two at a time and calls drawline function
* with either the next four array points or the next two from the index and the
* beginning two entries creating a loop.
* Also checks if the laser should be turned off while traversing between
* two points.
*/
while(1){
if(myIndex < length-3){
//Check if laser should be turned off.
if(myIndex == 34 || myIndex == 70 || myIndex == 88 || myIndex == 124 || myIndex ==160 || myIndex == 178 || myIndex == 218 || myIndex == 232){
for(counter = 1200; counter > 0; counter--){
counter = counter- 1;
}
P1OUT &= ~LASER;
}
//Draw a line from X,Y to X', Y'
drawLine(logo[myIndex], logo[myIndex+1], logo[myIndex+2], logo[myIndex+3]);
//Check if laser should be turned back on.
if(myIndex == 34 || myIndex == 70 || myIndex == 88 || myIndex == 124 || myIndex ==160 || myIndex == 178 || myIndex == 218 || myIndex == 232){
for(counter = 800; counter > 0; counter--){
counter = counter- 1;
}
P1OUT |= LASER;
}
myIndex = myIndex +2;
//Loop back to beginning of array.
} else {
for(counter = 1200; counter > 0; counter--){
counter = counter- 1;
}
P1OUT &= ~LASER;
drawLine(logo[myIndex], logo[myIndex+1], logo[0], logo[1]);
for(counter = 800; counter > 0; counter--){
counter = counter- 1;
}
P1OUT |= LASER;
myIndex = 0;
}
}
}
/*
* Given two coordinates, this function will find how many steps are between them
* and their coordinates and then send them to the writeMCP482x function.
*/
void drawLine(uint16_t x1, uint16_t y1, uint16_t x2, uint16_t y2){
//get the distance between x and y.
uint16_t dx = x1 > x2 ? x1 - x2 : x2 - x1;
uint16_t dy = y1 > y2 ? y1 - y2 : y2 - y1;
//calculate how many in-between steps are needed.
uint16_t steps = dx > dy ? dx : dy;
uint16_t finalSteps = 1;
while(finalSteps < steps){
finalSteps = finalSteps << 1;
}
finalSteps = finalSteps >> 1;
uint16_t Xincrement = (dx*128) / finalSteps;
uint16_t Yincrement = (dy*128) / finalSteps;
uint16_t x = x1*128;
uint16_t y = y1*128;
for(steps = 0; steps < finalSteps; steps++){
x = x1 < x2 ? x+Xincrement : x - Xincrement;
y = y1 < y2 ? y+Yincrement : y - Yincrement;
writeMCP492x(x/8, SSX);
writeMCP492x(y/8, SSY);
}
}
void writeMCP492x(uint16_t data,uint8_t ss) {
// Take the top 4 bits of config and the top 4 valid bits (data is actually a 12 bit number)
//and OR them together
uint8_t top_msg = (0x30 & 0xF0) | (0x0F & (data >> 8));
// Take the bottom octet of data
uint8_t lower_msg = (data & 0x00FF);
// Select our DAC, Active LOW
SSOUT &= ~ss;
// Send first 8 bits
UCB0TXBUF = top_msg;
while (UCBUSY & UCB0STAT);
// Send second 8 bits
UCB0TXBUF = lower_msg;
while (UCBUSY & UCB0STAT);
//Deselect DAC
SSOUT |= ss;
}
From the console, we see:
There were 874 (code) and 38 (data) bytes written to FLASH/FRAM. The expected RAM usage is 394 (uninitialized data + stack) bytes.
Gave us the following memory map:

And displayed:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.