 Kacper
KacperCurrent state of the project![]()

It’s no longer just a collection of random bits and pieces glued together. This time I’m actually happy with how it works and looks. By no means is it perfect, but it’s getting closer.
You can watch this video if you want to learn more about it – and not be forced to read. However, the text goes into more detail.
More details
The turret has been re-built from scratch with weight reduction as the most important factor. Firepower was right behind it. I wanted it to shoot harder than the blaster I had, fit more balls and if possible be a bit more precise. But at the same time I needed it to be lighter and smaller, so it wouldn’t need crazy powerful motors to be fast. + Being relatively cheap to build and easy to 3D print is a nice bonus.
| Old turret | New turret | |
| Magazine | 50 [balls] | ~90 [balls] |
| Shooting rate | 8 [balls/s] | 10 [balls/s] |
| “muzzle velocity” | 110 [km/h] | ~180-190 [km/h] |
| Weight | 2 [kg] (just blaster) | 2.5 [kg] (everything) |
| Height | 343 [mm] | 262 [mm] |
| Width | 202 [mm] | 154 [mm] |
| Length | 572 [mm] | 367 [mm] |
While the table does not show a weight reduction, the stats are a bit misleading. I’ve lost most of the parts used in the previous design, so I cannot properly weight them, that’s why it shows only the weight of the blaster for the previous design, and the entire assembly weight for new design. Anyway, new design is smaller and a lot lighter. I’ve also been able to move the battery away from the moving parts, so the inertia of the turret is greately reduced – this way I could make it way faster and responsive. Further weight reduction is possible, but I did not find it necessary.
The body
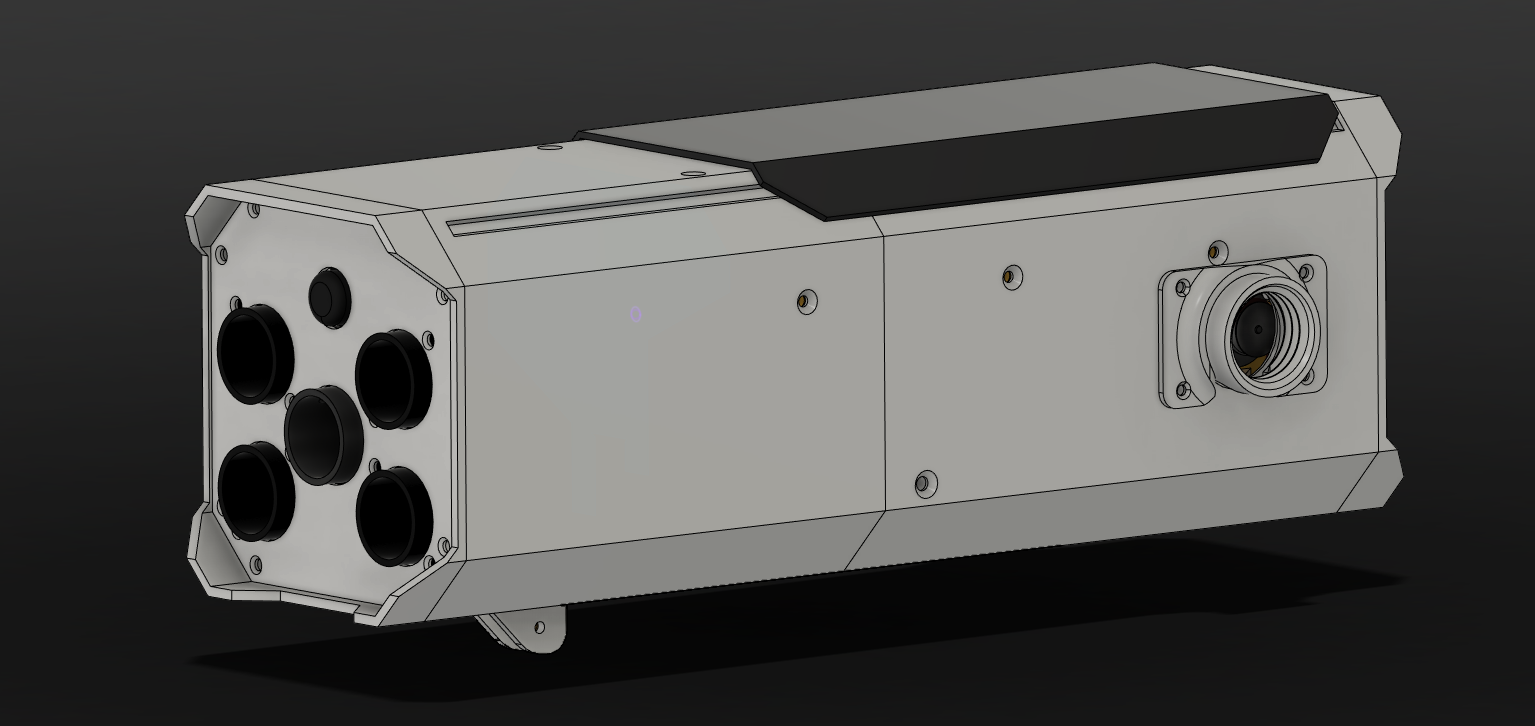
Everything fits nicely into 120x120x367 box. At first I just wanted to test it, so I made it super simple, but then I started to like the design so it stayed.
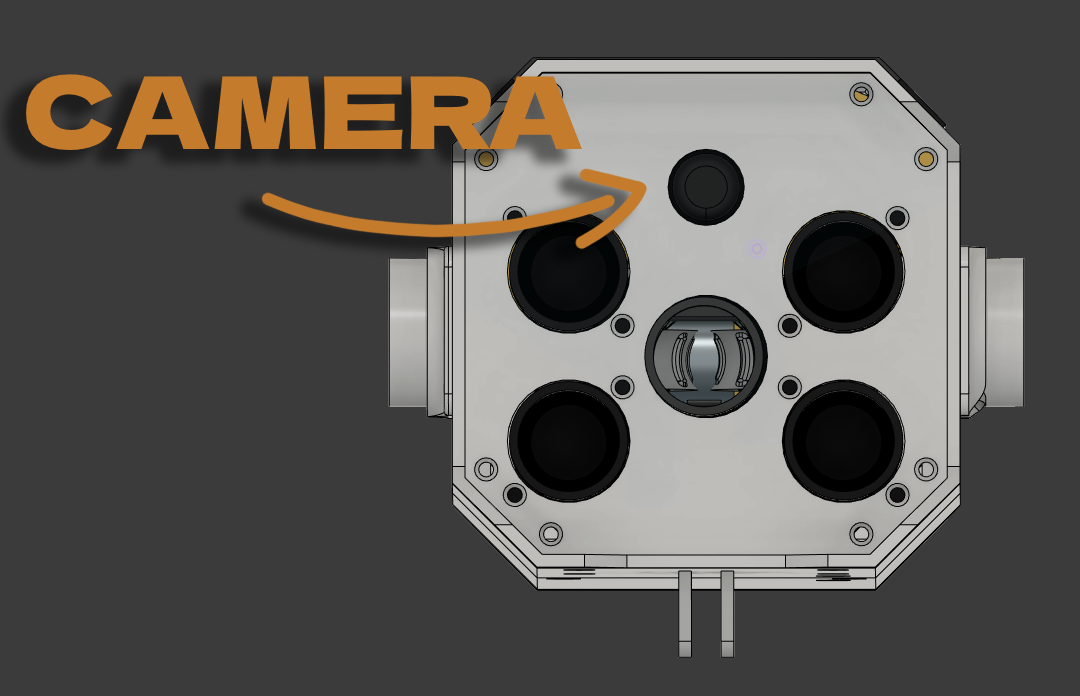
The front of it is the only interesting part. It has 5 barrels ( 4 of them are fake. In the future I’d love to use them to shoot small fireworks, but I’m concerned about the legality of making it do so – I’ll look into it) There’s also a camera that can be used both – for knowing what the blaster is pointing at, and for tracking humans.
The shooty bit
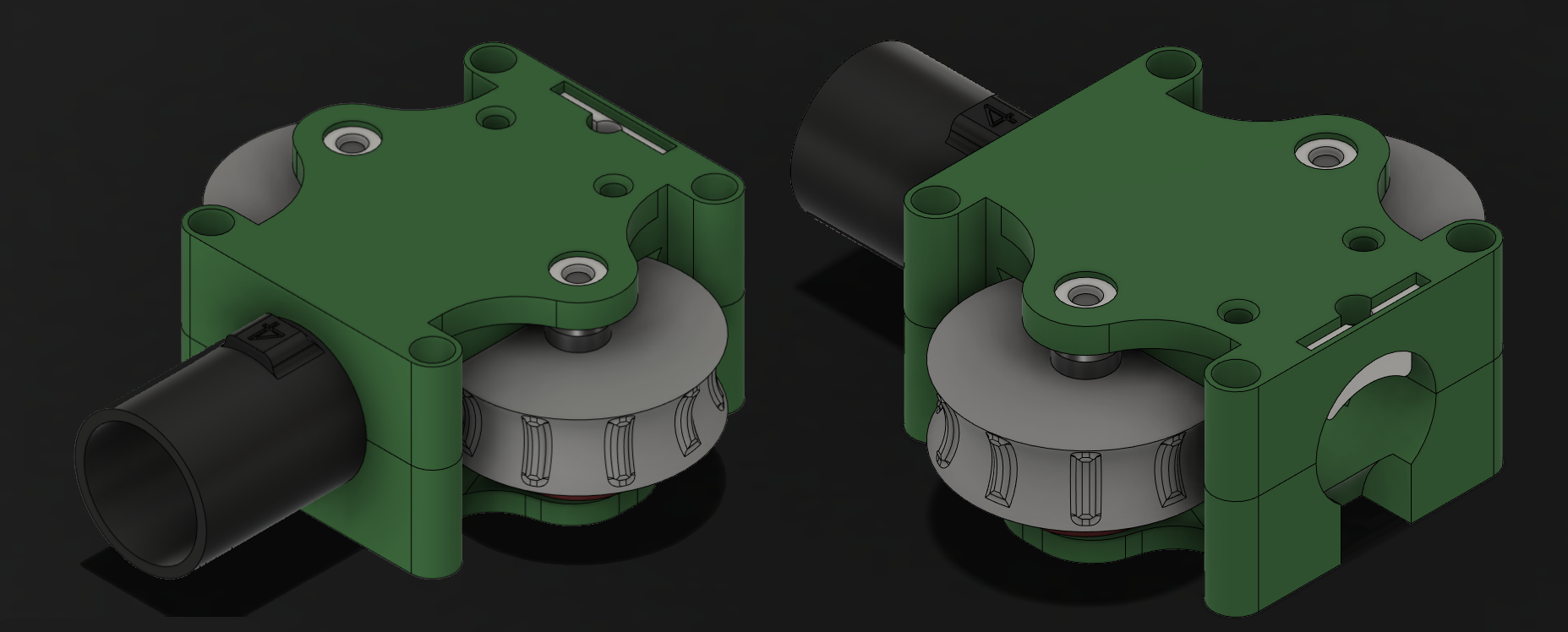
The part that flings the balls is obviously the most important part of the blaster. In the current design it uses two drone BLDC motors (2400 KV), two bearings for additional stiffness, plus a few screws and heat-set-inserts for holding everything together. Also, a spring from a clicky ball-point pen is used to make sure that it does not fire before you pull the trigger. This makes it a small and light-weight design, with suprising fire power.
The hopper
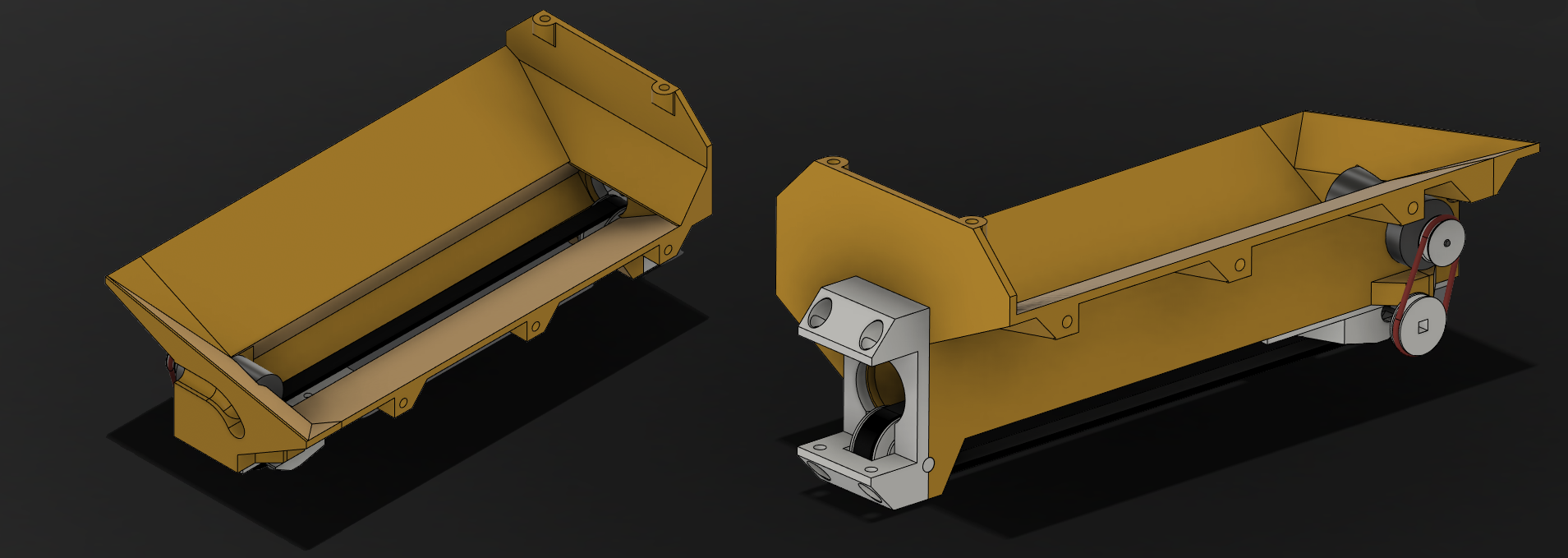
A functional but rather flawed design
Similarry to the NERF PERSES blaster – it uses a belt to get the HIR rounds between the intertial wheels of the shoting mechanism. The cheapest timing belt type I could find in Poland is the T5 belt – so that’s what I’ve built it for, but to be honest it can probably be used with anything that has teeth and isn't "too stretchy". I’m 90% sure you could print it out of TPU and it would work.
Flaw 1: Fits 90 balls but tends to get stuck if the number of them goes above 60.
Flaw 2: The motor it’s using is something I’ve found lying around in the office, and I couldn’t give you the specs of it if my life depended on it.
Flaw 3: I ran out of place for any good designs for power transmition so an O-ring is used as the driving belt. It works great most of the time, but can sometimes slip if the force needed to move the balls out of the hopper is too high. Usually it means that there’s a bigger problem – so I could potentially call this problem a “safety feature”.
Tilt movement
I hated the way the motors were sticking out in the previous design, so I’ve decided to hide them. At the same time, I had to make sure the motors will not be strained so much when moving. While reducing the weight of the blaster was going to make it less of a problem I wanted to use one motor instead of two to further reduce the cost of making this turret.
This design solved the problem, and introduced a new one – the toothed bar sticks out quite a lot, but it’s just a proof of concept, so there’s still a lot of time to fix it. Also, the up-down movement is no longer linear, which might be annoying.
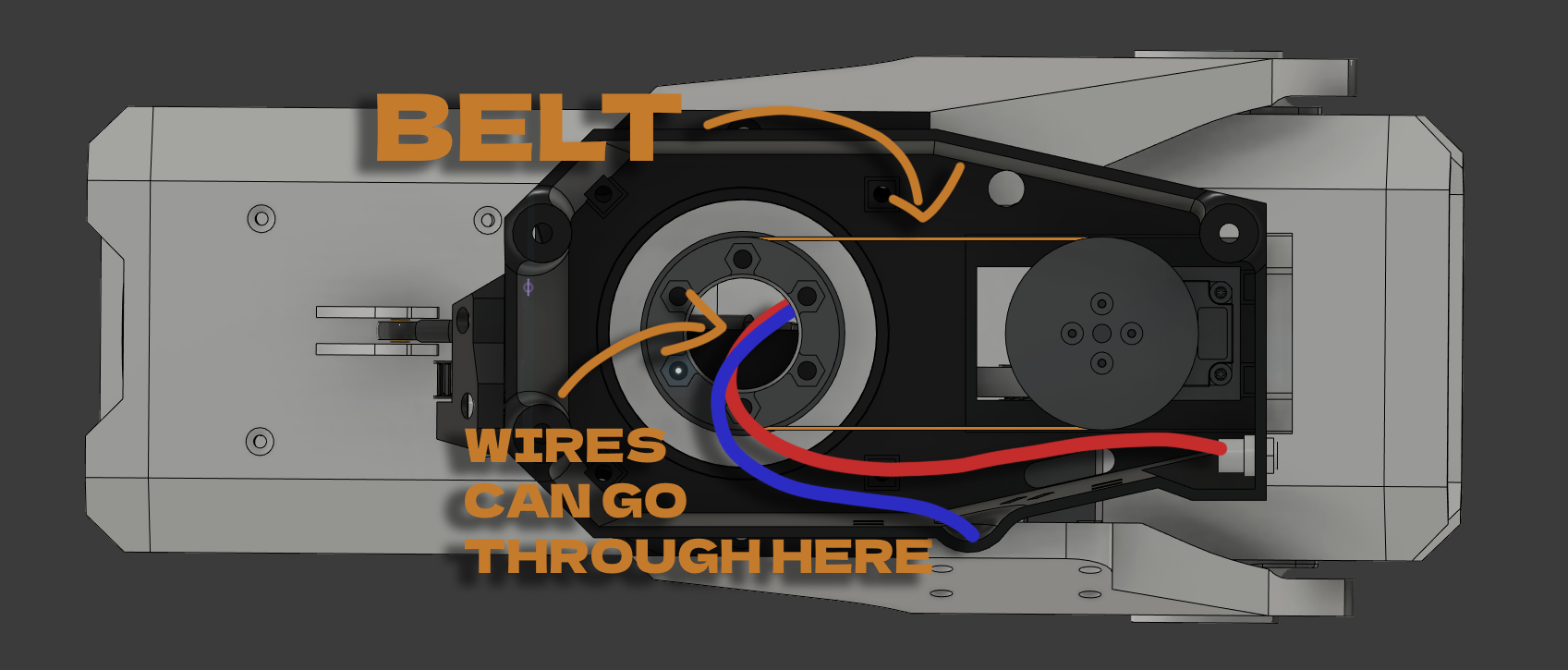
Pan movement
Is anyone really interested in it? There's a belt – so that I can run the wires through the axis.
Electronics
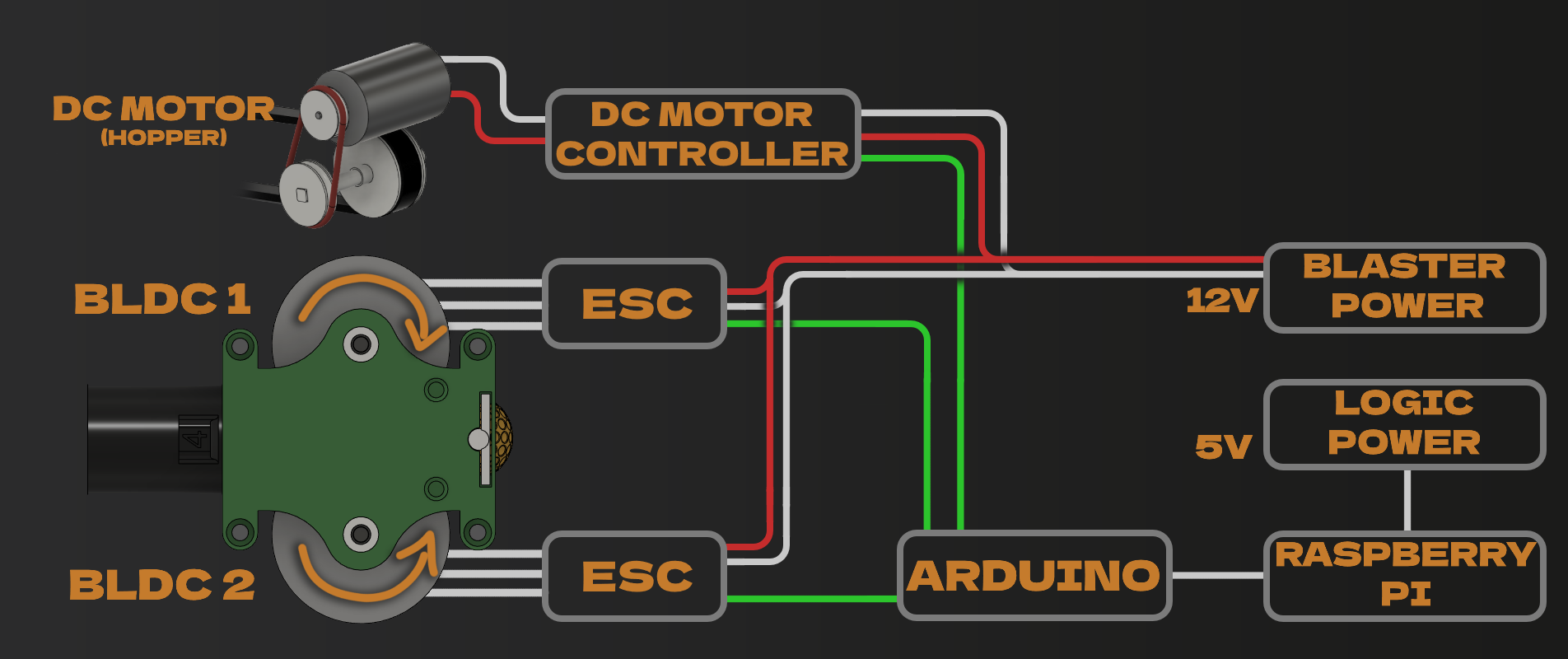
Apart from the components you can see in the picture above, i'm also using 2 dynamixl XL-430 servos for moving the turret. I'll get more in depth about my choice of components next time - when i fix all the problems and upload the files.
Software
No point in talking in depth about it – it’s not good – I don’t really enjoy programming that much.
The whole system is rather simple and can be divided into three parts
- blaster controls
- turret controls
- camera
Blaster controls – Code for an Arduino board controlling all of the motors inside the blaster
Turret controls – ROS node tasked with evaluating every input from a joy controller. The code decides what has to happen when you use the buttons, and also checks where the pan and tilt motors are to make sure they are not going to break anything. It can also react to messages from the human tracking system
Camera – everything involving showing you the view from the camera, adding crosshairs and human tracking.
There should be a link to github at the bottom of this page if you want to check the code, but really, nothing interesting will be hiding behind it – I’ll try to make everything work better before I upload the rest of the files.
Are you interested in building one like mine?
If so, tell me what you’d like to see in the instructions.
1. Just off the top guidelines eg. Buy this, Print that, build the package, connect everything, run it.
2. More precise instructions like – print part X with 60% infill, connect motors to motor controllers and those to the Arduino, upload the program
3. Super precise – download Arduino IDE, copy the code, upload it, install ROS by following XYZ make Xcm wire for Y,
I’ll try to best fit the instructions to the people willing to build it.
Open Source and licencing:
I really need to learn more about licensing – as of right now – I’ll just tell you that you can do whatever you feel like with the stuff I’ve posted. Just add a link to here/to the github page in the description. My boss will be happy, so I’ll have more money to develop this thing further.
The files for the whole project will be uploaded at some point. I’m too embarrassed to show you any of them for the time being. But do not worry – as long as for some reason I’m getting paid to work with this thing when I finish my real work – I’ll be trying to make it better. When it becomes sort of good / less deadly to itself and whoever decides to build it, I’ll publish the files. At the moment, you are stuck with just the code – bad, not optimized, written by a mechanical engineer and not a software engineer. Don’t expect much, but it’s yours if you need it.
Github link:
https://github.com/fictionlab/leo_nerf_turret
They pay me:
https://www.leorover.tech/