 Kiyotaka Akasaka
Kiyotaka Akasaka
Hardware
Architecture
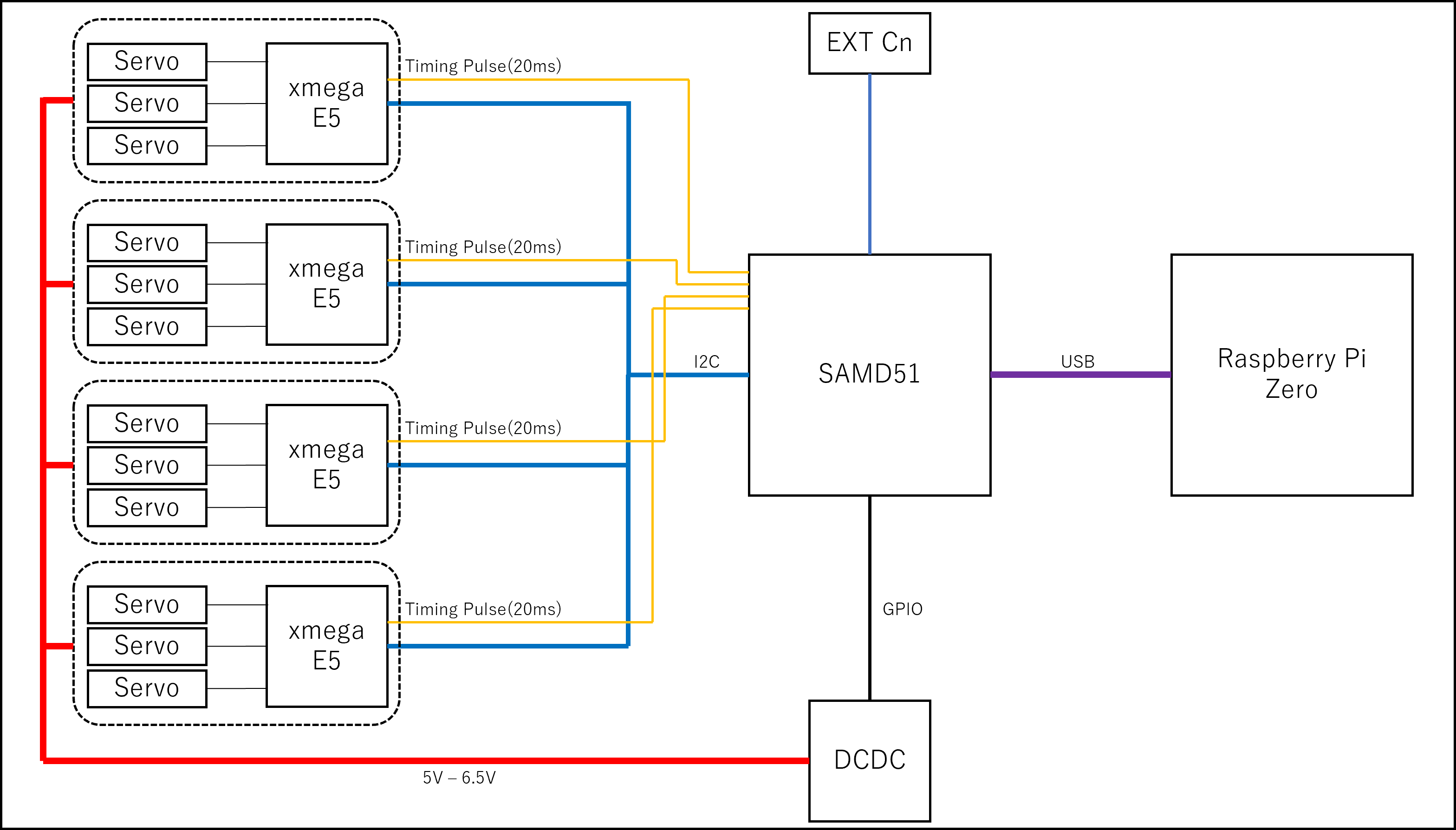
There is 12 servos for 4legs ( 3 servo / leg). I put a microcontroller for each legs to control 3 servos. The timing pulse(20ms) is outputed from main MCU (SAMD51) to synchronize all servos.
The power source of servo motor is from DCDC. The output voltage of DCDC is controlled by main MCU. The range of output voltage is 5 V to 6.5V.
Main MCU connected to Raspberry Pi zero via USB.





 bram
bram
 Tim Wilkinson
Tim Wilkinson
 Lingkang Zhang
Lingkang Zhang
 Wim Van Gool
Wim Van Gool
what is the material? what a cool design