 David
DavidBackground
FRC (First robotics competition) is a High School program built to promote STEM education. The students build 120lb robots to compete in a new challenge every year. The robots themselves cost thousands of dollars so each team typically only builds one. I want to provide a cheaper alternative to allow for more hands on learning and development.

This project has two main objectives:
- Create a large format, low cost kit
- Teach students skills they need to build competitive FRC robots
Skills to be taught:
- Safe use of power tools
- Read and understand part drawings
- Assembly practices and trouble shooting
- Basic electricity concepts (Voltage, Current, etc…)
- Wiring
- Basic drive code using WPI library
See update log #1 for what the initial lesson plans would be.
Kit components
The following describes the target components to be used
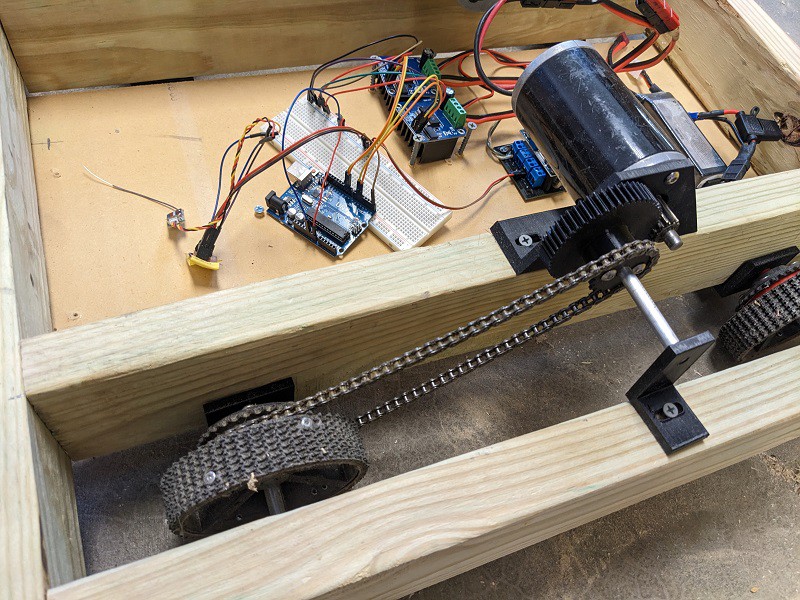
Frame
- 24"x 27" frame built with 2x4s
- Easy, cheap, sturdy. Components needing higher precision will be 3d printed
DriveTrain
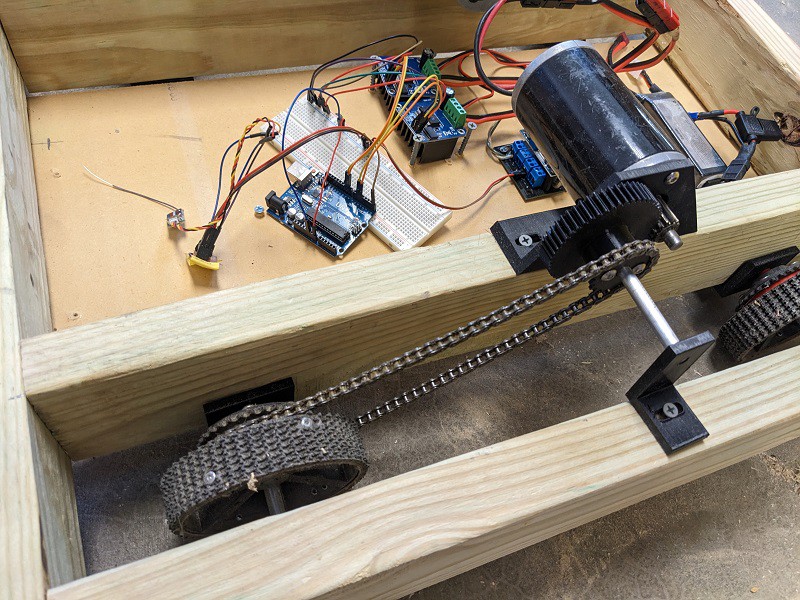
- 4 4" wheels on deadaxle
- Dead axle referring to the wheel spins on the axle and not with
- Axles are 8mm to make It easy to switch to using cheap 608z bearings later on
- Axle supports are 3d printed brackets
- Have not tested turning on carpet, may need to switch to 6 wheel drop
- 2 12V Cim brushed motors, 7.7 gear reduction
- First stage is aluminum pinion gear->3d printed PETG gear
- Second stage is 3d printed sprockets
- Cims are readily available to FRC teams but may switch to another motor for reduced cost
Power
- 3s lipo
- Readily available on amazon or other RC Hobby sports retailers
- Could easily be switched with standard FRC lead acid battery
- Power distribution
- Custom power distribution board
- Has mounting location for voltage regulator
- Could easily be switched out with standard FRC distribution boards
- Power switch
- 120 amp breaker switch
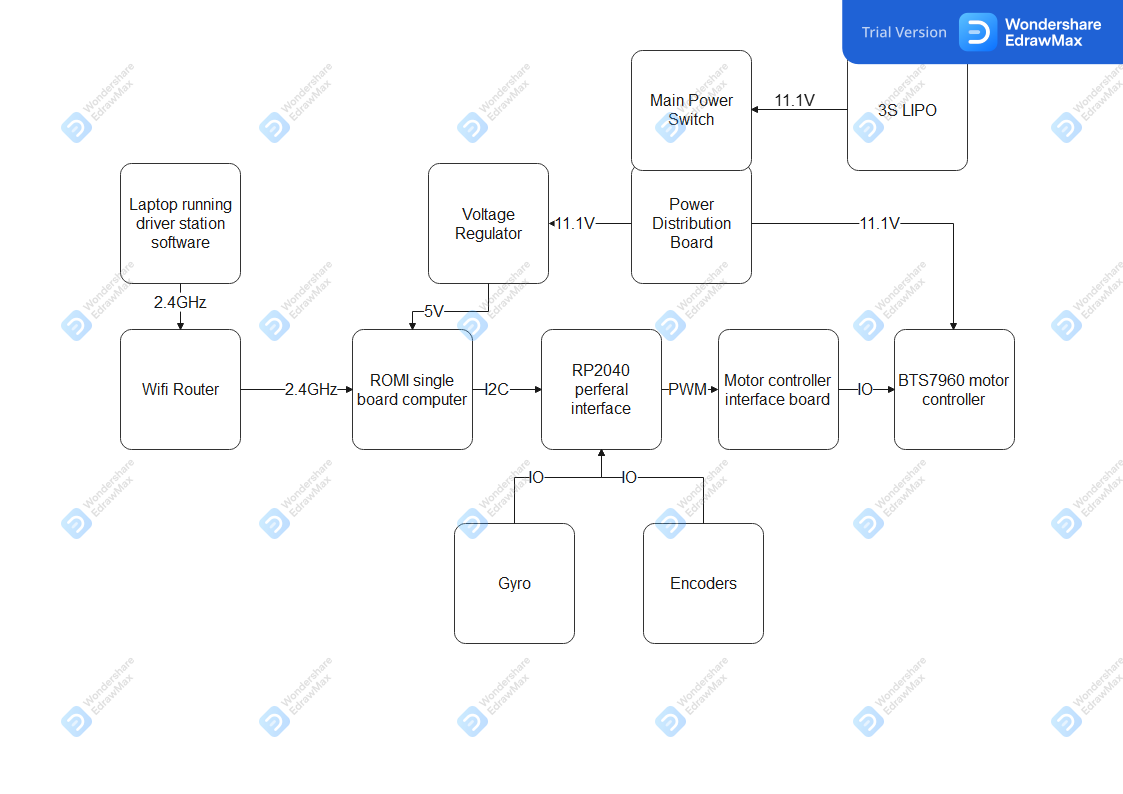
Control
- Linux single board computer running "ROMI" software for main controller
- Standard FRC control system uses a National Instrument's RoboRio, ROMI software simulates that device
- RP2040 for real time peripheral interface
- I2C slave device to single board computer
- Handles communication to motor controllers and sensors
- BTS7960 for DC motor controllers
- High power controller with built in over current protection
- Need a interface board to convert normal RC style PWM signal to BTS7960 control signals



 Tobias
Tobias
 Darren V Levine
Darren V Levine
