 lion mclionhead
lion mclionheadThere are still too many cases of tensorrt detecting only the background & not the lion so there would be no way to deglitch that. Sometimes the lion hits are out of frame & sometimes the glitch hits are out of frame so testing for out of bounds coordinates wouldn't work.
model_inspect.py as a frame server started to appeal. It takes 3-4 minutes to start & requires a swap space but it goes at 12.5fps. inspector.py using a frozen model goes at 10.5fps. Not sure why there is such a difference between inspector.py + frozen model & model_inspect.py + checkpoint. It would be quite tedious to debug model_inspect.py.
After 4 years out of production, the raspberry pi series resumed production in 2024 with the 5. At this point, a raspberry pi 5 would be vastly faster than the jetson nano as a tracking cam, start faster, take less space, use less power.
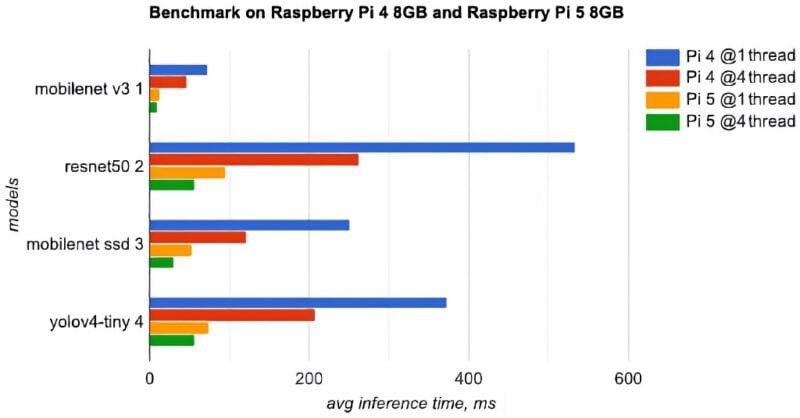
https://www.raspberrypi.com/news/benchmarking-raspberry-pi-5/
They show neural network benchmarks going at least 3x faster than the raspberry pi 4, so at least 24fps would be achieved. The jetson only hit 20fps with tensorrt efficientdet. Having invested most of 1.5 years on the jetson nano, it was time to move on.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.