 CriptasticHacker
CriptasticHacker^ First DEMO VIDEO to show current project progress!
*** Please check out the Project Logs - that's where all the best stuff is! :)
This project is on hiatus for the moment
if you(!) or anyone you know is interested in supporting it, feel free to drop me a message here! You can contact me here or at criplishus [at] gmail
-- The P R O B L E M --
This project was born of necessity, as I have hand disabilities in addition to being crippled. Manufacturers of DME (Durable Medical Equipment) do not often seem to consider the scenario of multiple disabilities or get much feedback from our community, as these devices are:
1) painful to operate / extremely uncomfortable
2) closed-source, with almost non-existent parts and support
3) have high mark-up (on the assumption that all cripples have insurance - we do not)
4) Use 1990s technology with little to no innovation
-- The S O L U T I O N --
I am going to show these DME industry people how to do it right - and hopefully inspire others to take our valuable feedback as disabled customers to create innovating, exciting, and (dare I say) comfortable solutions :)
There's a lot to fix on modern electric wheelchair and scooters, but I am going to set my sights on creating a more accessible motion control mechanism.
-- B A C K G R O U N D ---
Wheelchair Types:
There are 2 basic types of electric (a.k.a. motorized) wheelchairs. Let me describe them:

1) The "Power Wheelchair" has 2-wheel drive, 4-way motion system. These are upright chairs with 2x passive caster-type wheels in the front, and are designed to be as compact as possible. They are primarily for short-range movements, and meant for people staying indoors. These chairs usually employ a multi-directional analog stick control, and similar to a video game analog control stick, have built in springs for each direction to return to the home (center / off) position.

2) The Wheelchair Scooter, a.k.a. Mobility Scooter, is a much larger device, usually with a single transaxle motor so that motion is only bi-directional, requiring the user to steer left or right by moving handle bars (like a regular bike). Only one wheel is actually driven by the motor, making these easier to get stuck sometimes on elevated platforms like curbs or bumps. The steering of the user changes the forward or reverse angle, not the motors, which means a much wider turning radius. In exchange for this, these wheelchairs are often lighter, less expensive, and can travel farther - used for going to stores or events. If you are in a modern city, these can often still fit on buses, too.
-- T H I S P R O J E C T --
I'm going to be hacking / upgrading my wheelchair scooter (#2 above), due to:
1) Personal need
2) Ease of modification
3) Easier reproducibility
4) More uncomfortable (and thus, more need to fix!)
The first step is to learn about the stock motion /user control mechanism. It is a single lever designed as a bi-directional "throttle" (forward and reverse) by turning a mechanical potentiometer which is in the center of the lever:


The potentiometer is a 5k ohm "industrial" pot, part # CM46371 by Honeywell. It's a bit mysterious without a datasheet I could find (even on Mouser) and our good friends at Monster Scooter Parts have marked it up to a whopping $35.99(!) This is the only resort for poor cripples trying to fix their wheelchairs....although this page may have some in stock if you're lucky.
-- STOCK CONTROL REVIEW --
(The Problems)
This control device has always felt akin to some kind of torture machine to my hands as well as my wallet.
One needn't look far to see the engineering flaws that are present here:
1) A single high tension spring to provide lopsided control. A sensible design should have two springs and provide equal tension in either the forward or reverse direction.
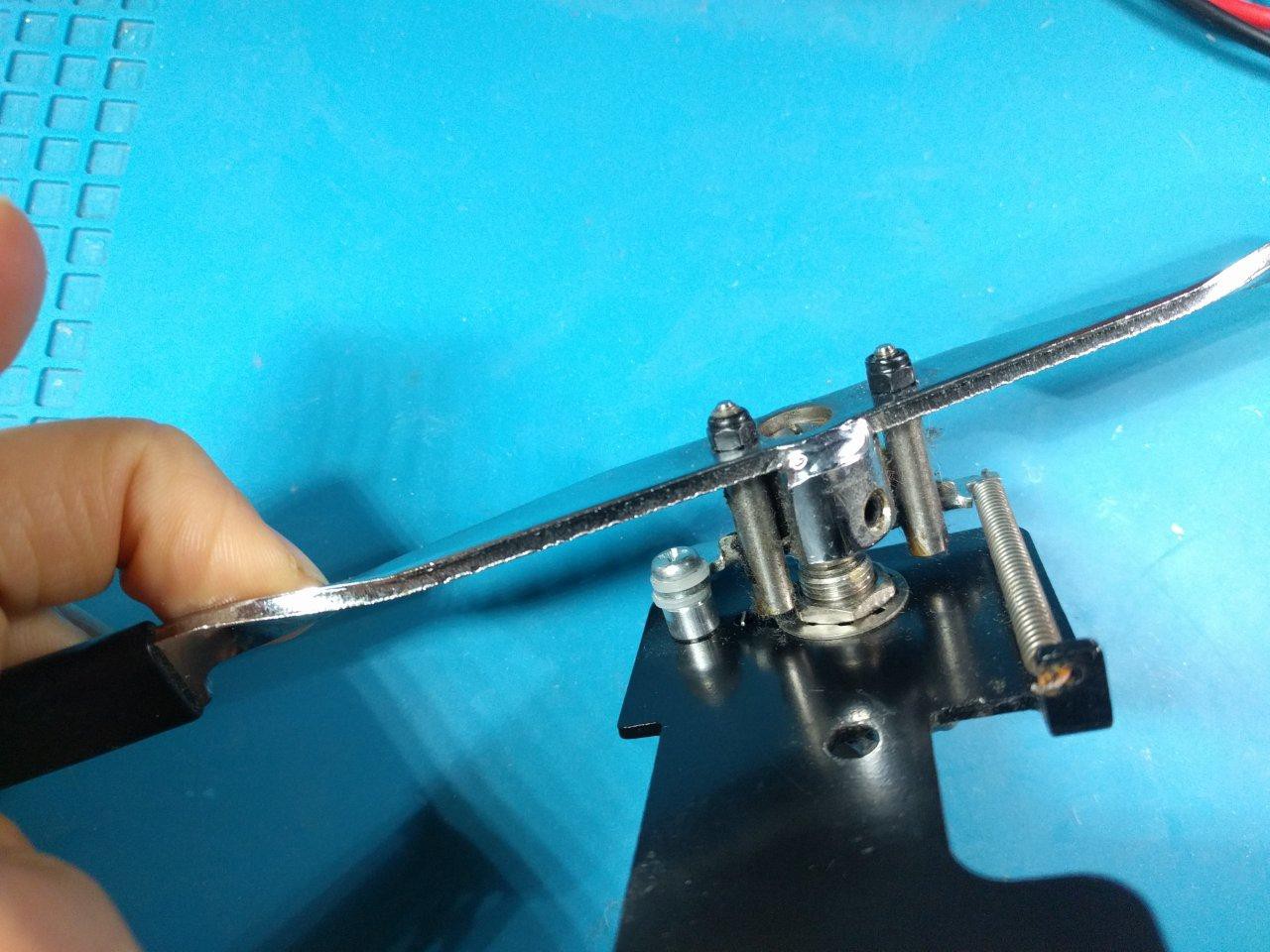
2) A smooth, rounded shaft for the potentiometer (!) instead of knurled or type D shaft. Potentiometer shafts come in various types, and are specifically catered to how they will be mounted. A type D shaft would be appropriate in this scenario; as the name suggests, looking directly down on it there is a "D" shape, with a flat side designed specifically for a set screw.
This design as such lacks an appropriate set screw to accommodate the vastly irregular tilting, angular motion, and general abuse this part takes (compared with say, a volume knob).
Indeed, it has 2x set screws threaded into the lever mount, and these can only embed themselves into the circular shaft of the potentiometer through pressure, by literally scoring the metal. Yikes.
3) Metal stop spacers: In order to keep the spring tension consistent with the forward and reverse movements, there are two long metal spacers secured by M4 phillips screws and accompanying thread lock nuts parallel to the potentiometer shaft. These are also very problematic, since a slight deviation in the Z height for the aforementioned set screws means that these metal standoffs begin rubbing against the potentiometer's main hex nut! This deviation can happen from a repair or the set screws becoming loose over time. This also adds unnecessary complexity to assembly.
4) Low range of movement (and finicky). Unlike a typical logarithmic potentiometer, the bell curve on this thing is very pronounced. the "sweet spot" is designed to change most of the pot resistance with maybe less than a quarter of a turn. This of course increases the chances of failure as well as the costly issues of reinstall/alignment and the repercussions of dead spots, making a partial failure state more likely to require a complete replacement.
5) It's mechanical. Last, and perhaps most important, is the reliance on a mechanical part. This part is prone to a slew of issues from dust and debris throwing off the reading (and thus stalling your CPU / wheelchair), possible dead spots in the resistive track, as well as a much more limited lifespan. Yes, we need to do better!
- - -
(more to come...)