 Juan-Antonio Søren E.P.
Juan-Antonio Søren E.P.Running SimpleFOC with trapezoidal-planner. Max velocity set to 50rad/s, acceleration and de-acceleration set to 25rad/s/s
0%
0%
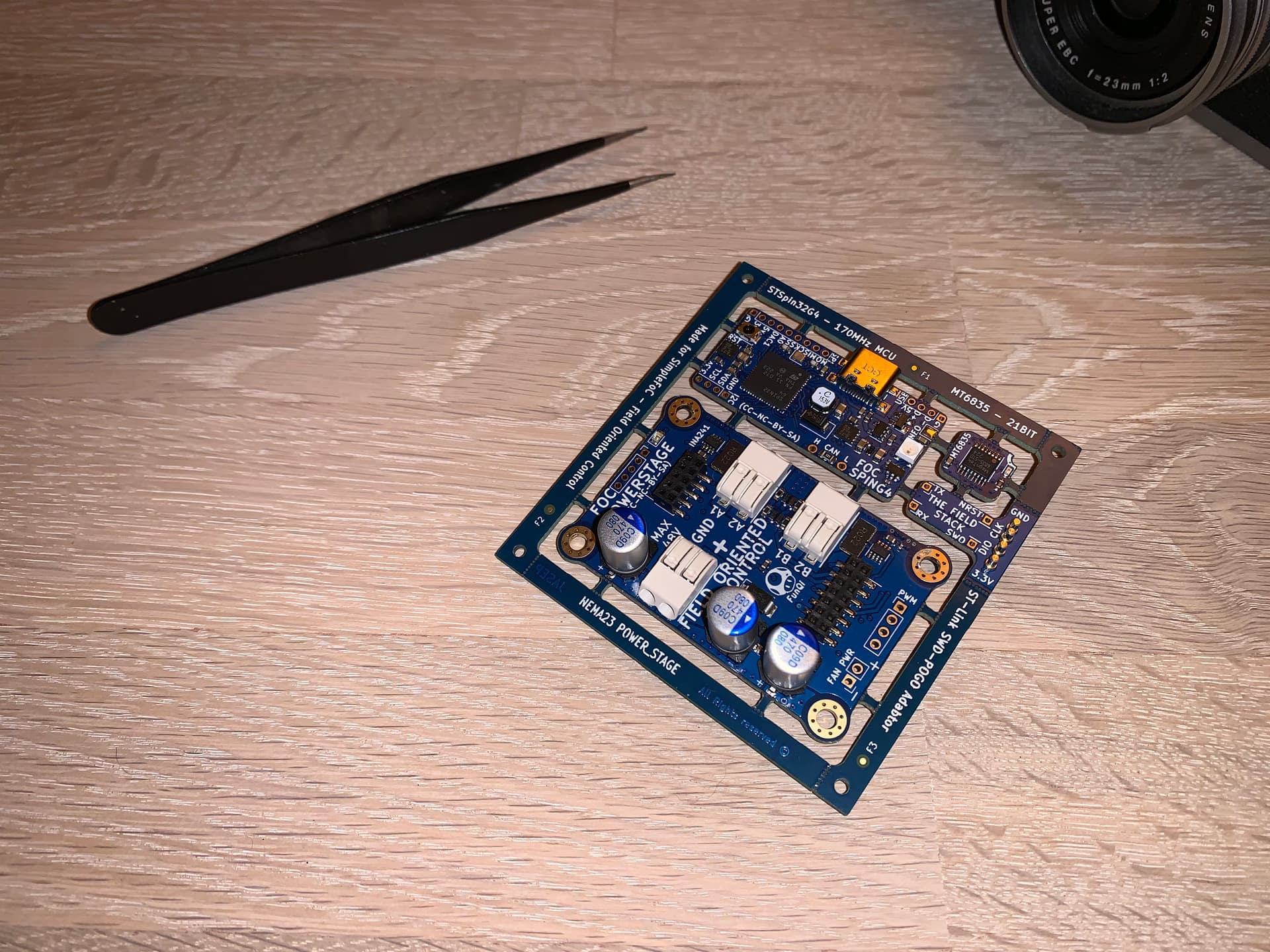
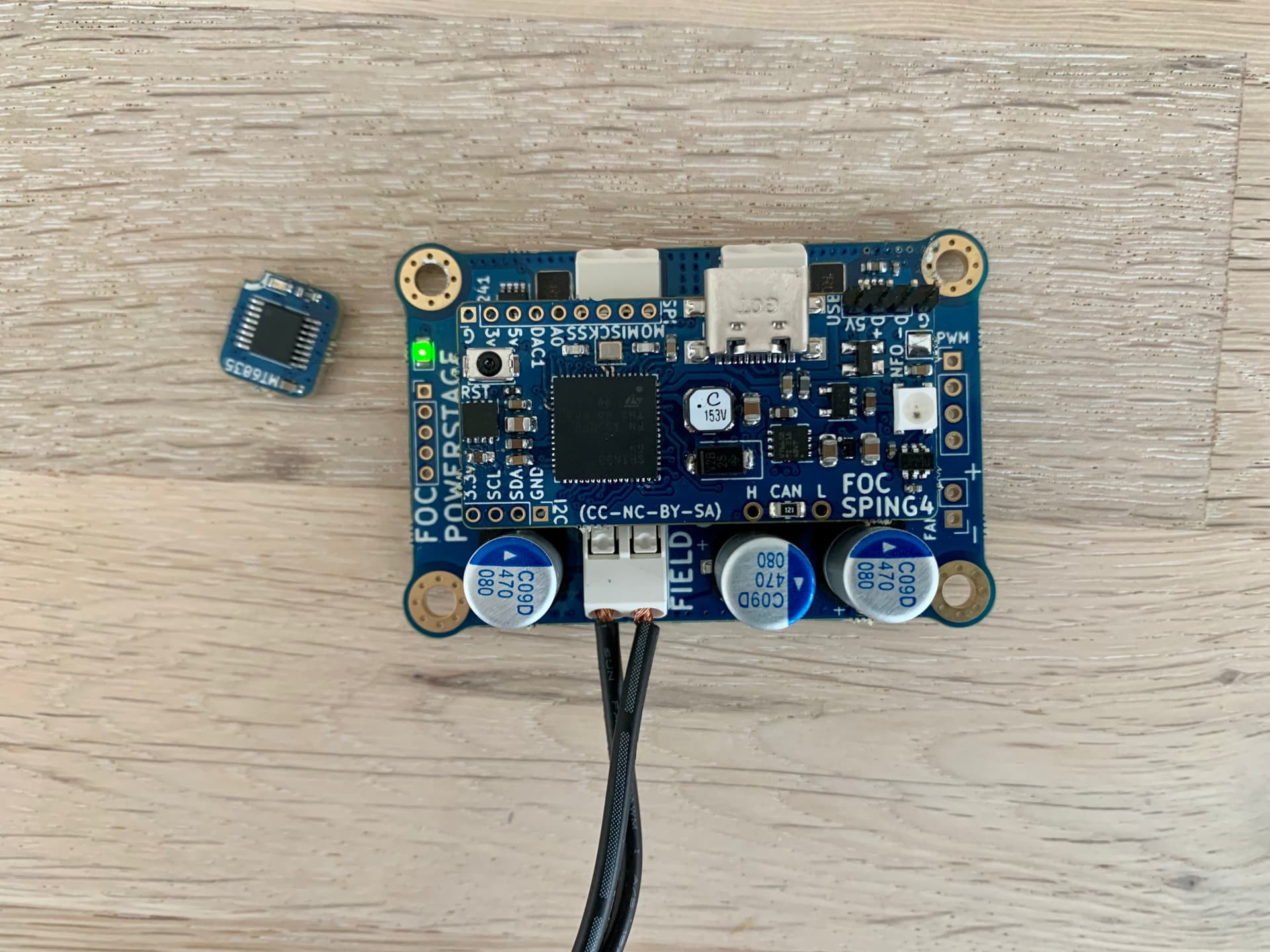
The Field Stack - NEMA23/34 FOC
If we win the Hackaday price, we will make BETA give aways. FOC field-oriented control for NEMA23/34
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 Anthrobotics
Anthrobotics
 ridonkulus
ridonkulus
 Simone Tolomei
Simone Tolomei
 Andy Preston
Andy Preston
Love the form factor for this! Ive been wanting a stepper motor driver with an esp32 so the servo system can recieve commands via a "normal" web interface, does this wifi / bluetooth?