 Richard Sand
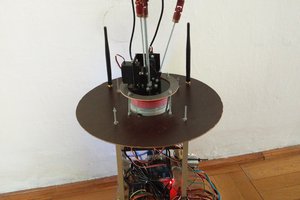
Richard SandThe frame is made using 10mm x 10mm aluminum extrusion from a Makerbot kit.
The microcontroller is an NVidia Jetson Nano 4GB dev kit
The 12 leg servos are MG996R servos
The 2 camera servos are SG90 servos
The camera is a simple Arducam 5mp camera
I use the PCA9685 PWM controller to drive the 14 servos, connected to one of the I2C connectors (2 pins) on the Nano

 BTom
BTom

 kutluhan_aktar
kutluhan_aktar