 Kumar, Abhishek
Kumar, AbhishekI have a couple of reasons for creating this: (i) Doubting the efficacy of existing solutions in the market (even though I have come across products with good reviews, while most have bad reviews), (ii) Having control over the stack of what I build (spare parts) and the generated data, and of course, the most important, (iii) the educational aspect of building this - as it will not just teach fundamentals of robotics to whoever builds it, but also some degree of autonomous location mapping and provide a platform to try more experiments in the future if needed.
This project also marks my return after a pretty long hiatus from the Hackaday community.
Premise
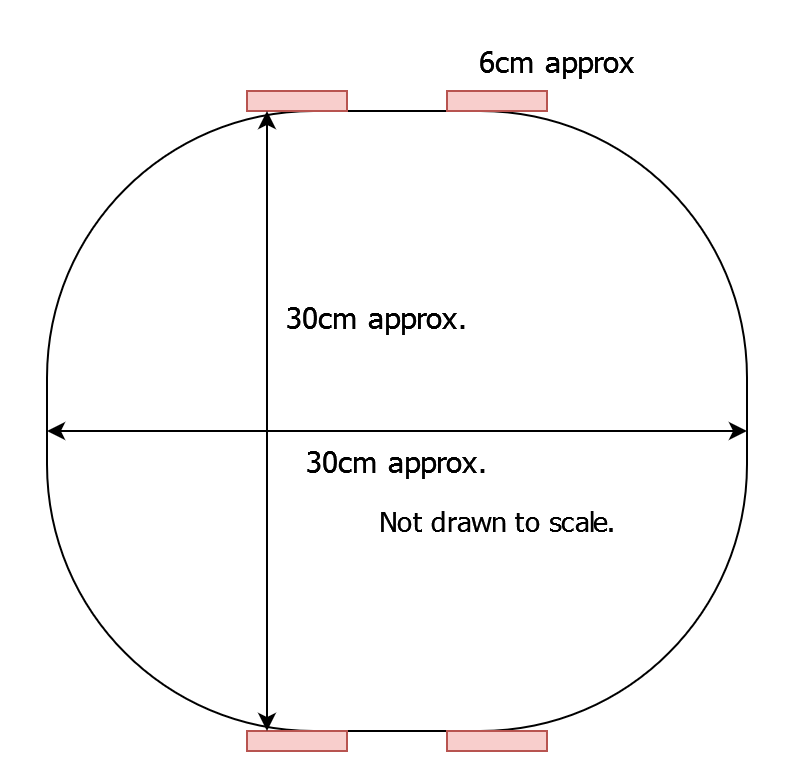
During the pandemic and afterwards, a lot of robot vacuum cleaners proliferated in the Indian market at least (and I would guess in other markets as well) - exhibit 1, exhibit 2, exhibit 3. These are small battery-powered 2-wheel robots, containing sensors, and a small vacuum cleaner and a few rotating brushes that aim to get rid of the floor dust in an autonomous fashion. While they all lie somewhere in the 200-300 USD price range, I have always wondered how effective they are in reality - plus these devices do not have readily available spare parts available in case things go wrong, their firmware and electronics is closed and so is the app bundled with them.
I have always wanted to build something like this for myself so that I can learn the basic premises behind this like SLAM, plus local inference if running computer vision algorithms. Also there is a DIY element to this whole thing wherein you can pick and choose what works best for you, while this project will provide a standardised hardware option, builders of this project can choose to, if they wish, bring SBCs that they already have while not being too much of a porting hassle.
The downside of a DIY approach is unfortunately that this project may not appeal to someone who is looking for a ready-made solution or not ready to invest the time and effort necessary to build this and customize it to their availability based on the components that one can source locally. But the educational aspect of this project is the reward.

 tlankford01
tlankford01
 AVR
AVR
 Madaeon
Madaeon
 Giovanni Leal
Giovanni Leal