 M. Bindhammer
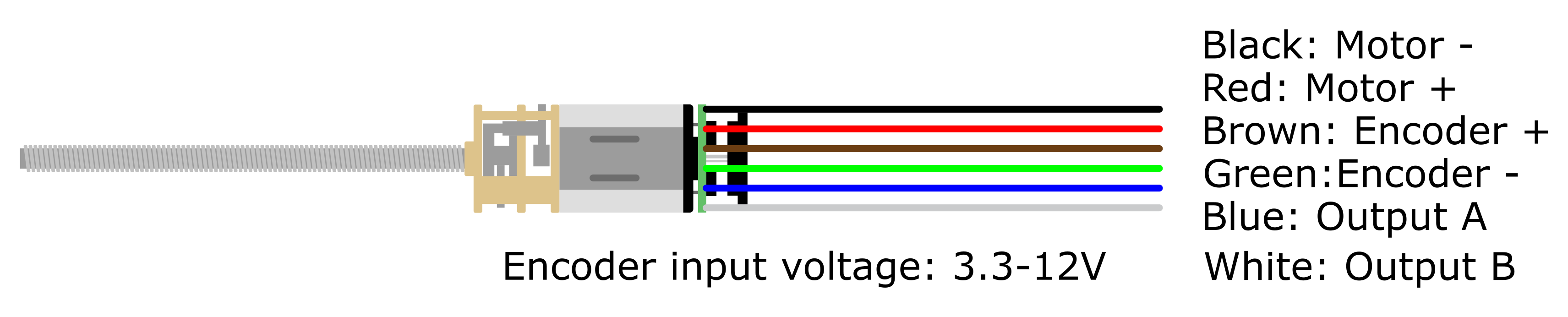
M. BindhammerIt took me a while to figure out the wiring of the encoder PCB. It is as follows:
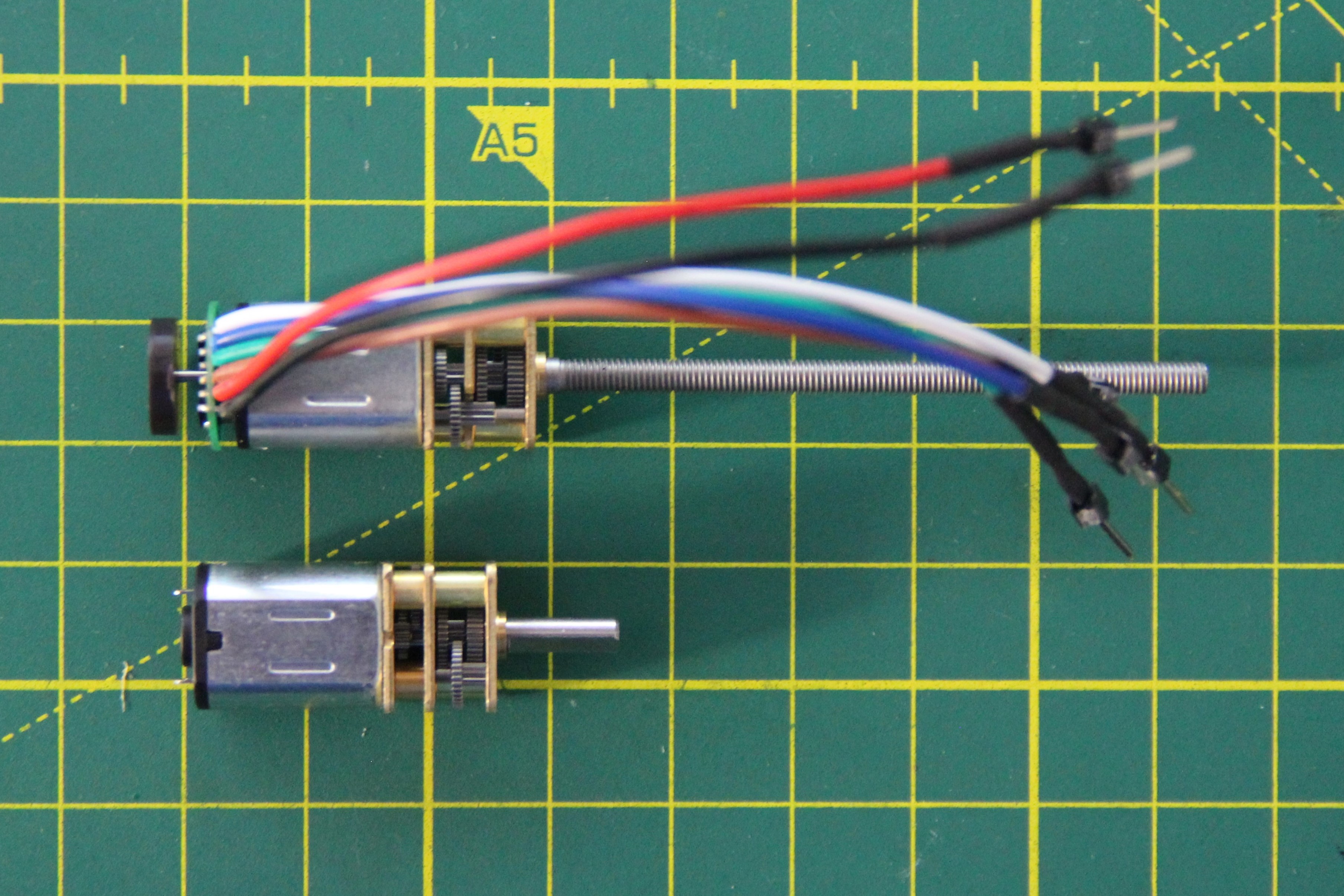
After soldering pin headers to the motor wires, the rotary encoder was tested with an Arduino Mega.
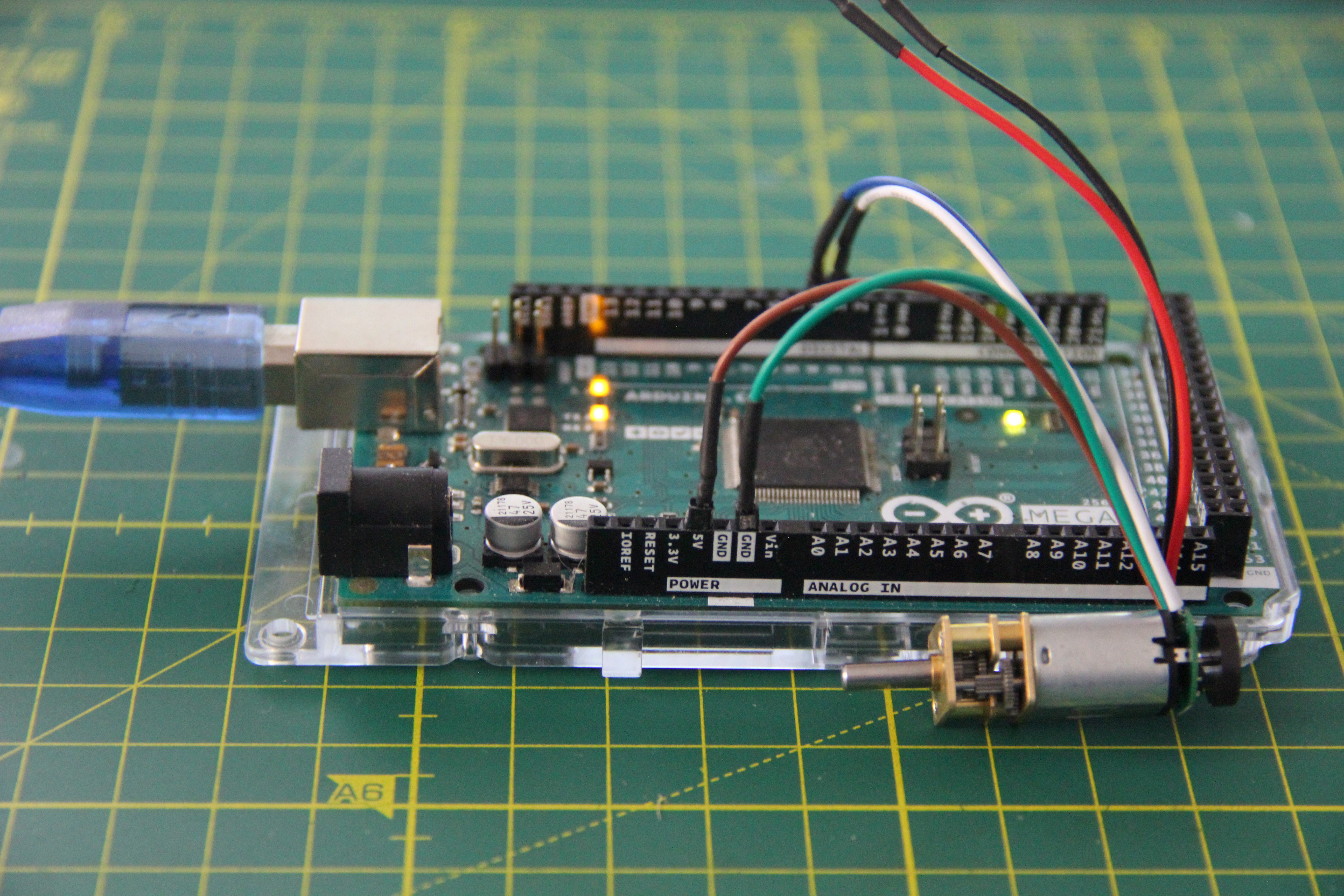
I took the test code from the Arduino project hub.
int counter=0;
String dir="";
unsigned long last_run=0;
void setup() {
Serial.begin(9600);
attachInterrupt(digitalPinToInterrupt(3), shaft_moved, FALLING);
pinMode(4,INPUT);
}
void shaft_moved(){
if (millis()-last_run>5){
if (digitalRead(4)==1){
counter++;
dir="CW";
}
if (digitalRead(4)==0){
counter--;
dir="CCW";}
last_run=millis();
}
}
void loop() {
Serial.print("counter : ");
Serial.print(counter);
Serial.print(" direction : ");
Serial.println(dir);
}
The rotary encoder has a resolution of six counts per revolution of the motor shaft. A motor driver with a break function is certainly required, plus PID control.
Finally, I changed the motors, which is absolutely no problem. For this, only two screws have to be loosened with a small Phillips screwdriver.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.