 AVR
AVRHey folks !! this project page hasn't been updated in a while but the project has been worked on continuously over the past 7 months or so, just nothing very notable to update on since the last update. The biggest news is the PCB design for the JoyStick-HID Hat is finished, well at least the rev 1 version of the design is done. We have done an internal design review with our engineering team and made a few tweaks and we will be fabricating prototypes very soon. Somethings have changed with the design but everything is mostly the same!
The RPi will be a version 5 instead of a 3/4 as originally planned. Instead of running a custom application on the RPi we will be using ROS2 with a few custom ROS packages running on the RPi to achieve what we wanted it to do. ROS Package for interfacing with the bluetooth battery management system built into the LiFEPoE battery and sending LED information to the JoyStick-HID hat for display to the user. A ROS package for interfacing with USB HID devices and translating the data out of them into JoyStick XY parameters and other datatypes so that users can use HID devices like keyboards/mic/Xbox controllers to control their chair or have someone else control their chair. There will be more ROS packages but we are still in the early stages of software design.
Anyways here the hardware !! Some quick specs to get things started:
- STM32F446RET6 100TQFP ARM Cortex M4 Microcontoller
- ARM Cortex M Serial Debu Interface/connector for in system programming and development - MAX3535ECWI+T RS485 Transceiver for communicating with main motor controller
- D24V22F5 2.5A 5VDC Voltage Regulator Module
- D24V22F3 2.5A 3.3VDC Voltage Regulator Module
- D24V22F12 2.5A 12VDC Voltage Regulator Module
- 24V Power Input with High Current Pheonix Contact Connector
- 12V Power output with High current Phoenix Contact Connector
- Rapsberry Pi 5 Running ROS2, directly power via header from 5VDC rail
- 8 Debug LEDs for STM32F446RET6
- 8 Debug LEDs for RPi 5
- Onboard Battery for STM32F446RET6 RealTime Clock
- Interface for JoyStick, JH-D202X-R2/R4 Joystick 5K https://protosupplies.com/product/jh-d202x-r2-r4-joystick-5k/
- Interface for two Rotary Switches
- Interface for 8 Momentary swiches/buttons
- Interface for LED driver board, this additional board drives LEDs in the arm wrest indicating battery level and current set speed
- STM32 will run custom FreeRTOS or ROS-Micro more to follow
This hat is intended as a developmental platform that can function in the field, it has all the features needed to control the wheel chair with additional feature that will make software development easier. The final version will be much simpler and low cost, this is only the beginning.
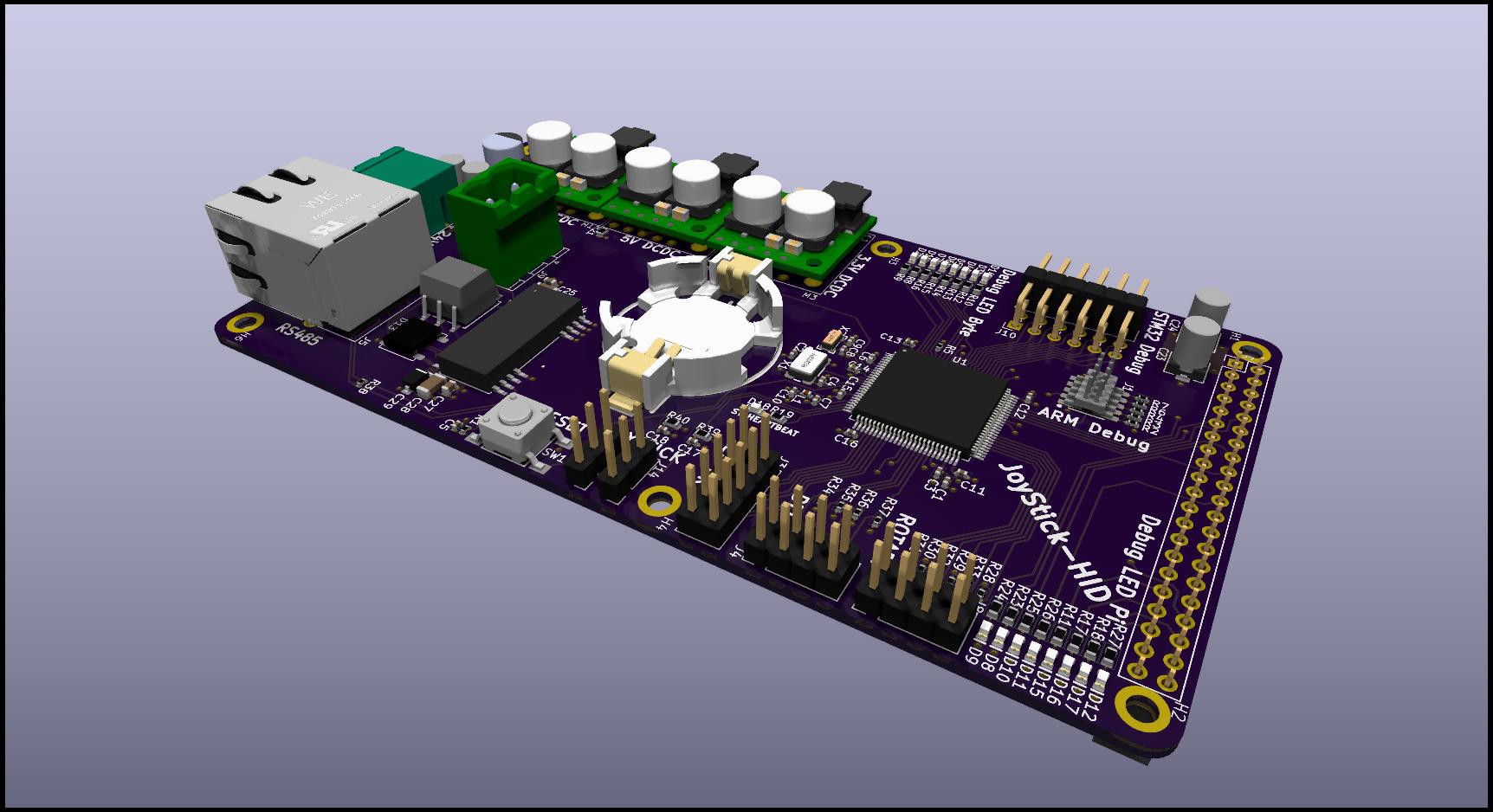
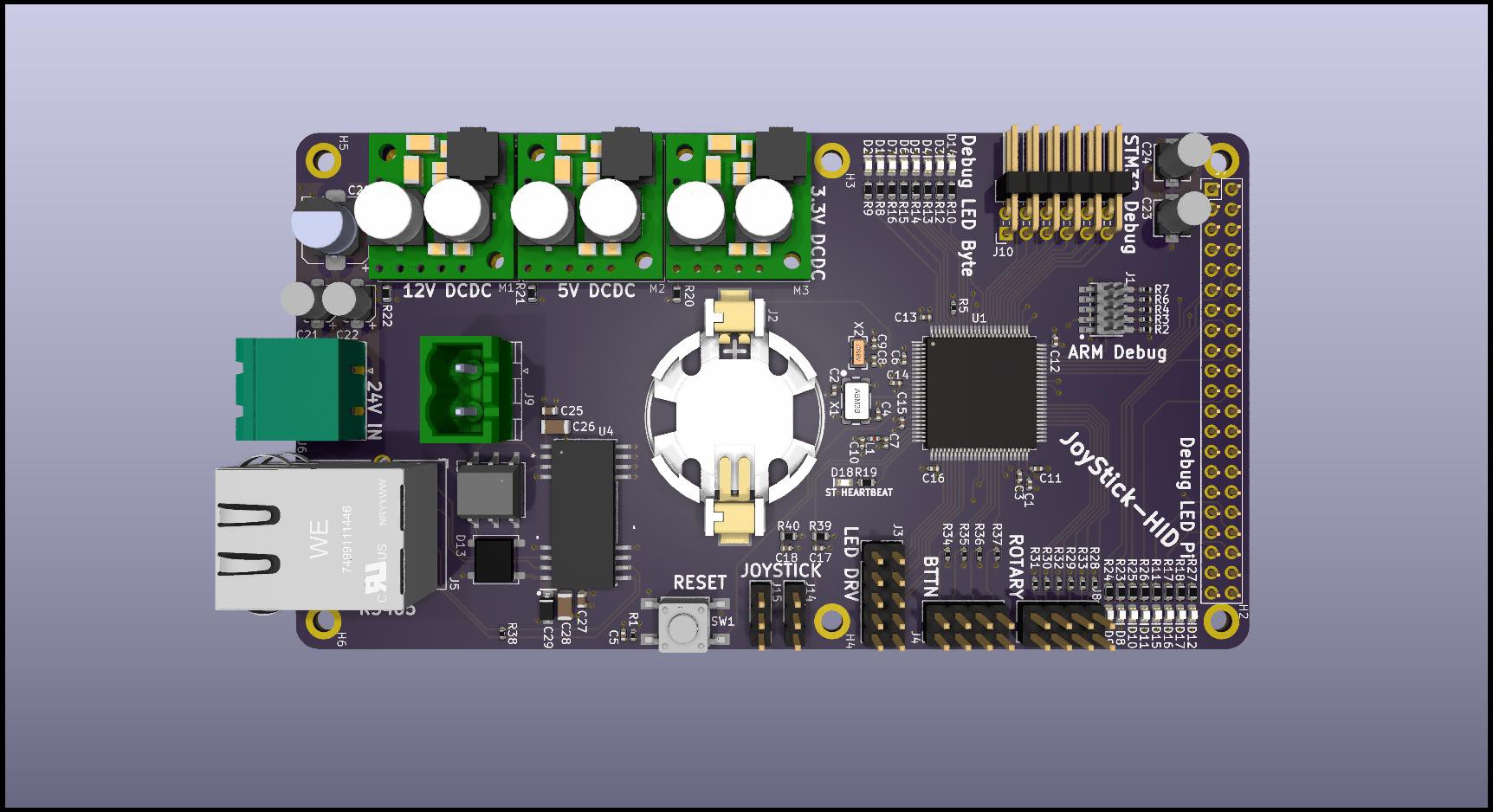
And of course the moment you've been waiting for ! Renders of the PCB !!
2D Render:
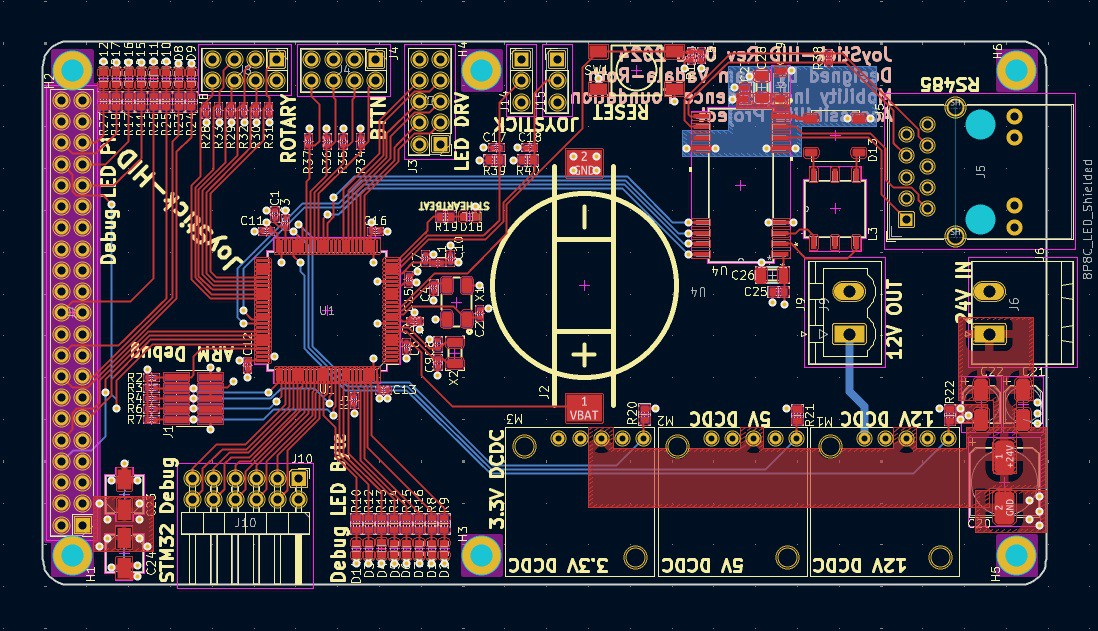
3D Renders:
That's all for now! More to follow! Thanks for your continued support of my open source projects !
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.