 Gaultier Lecaillon
Gaultier LecaillonContext
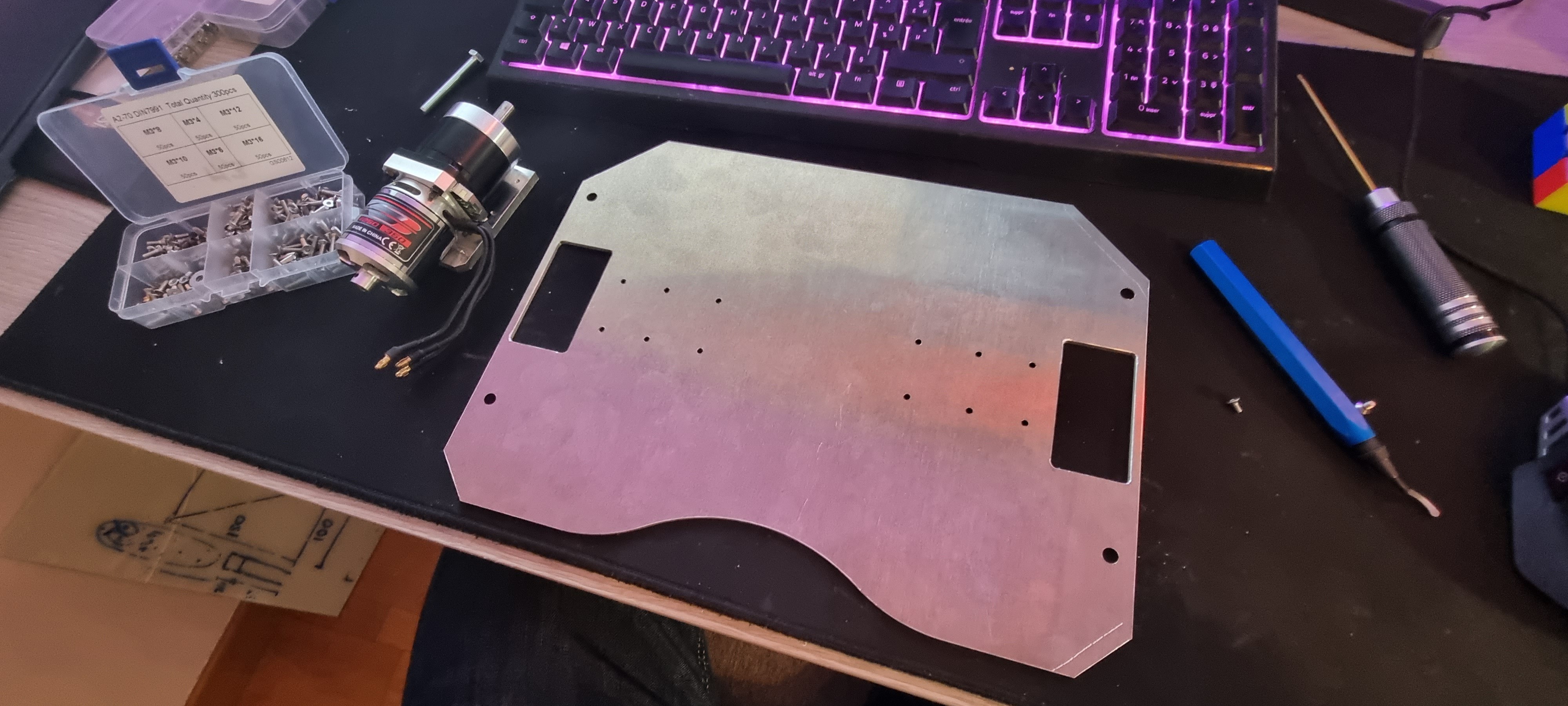
The mobility concept for the robot involves the use of two centrally located wheels and four height-adjustable pads at the corners of the chassis for stability. This arrangement facilitates smooth rotations without altering the robot's x and y position within its environment.

Objectives
Our primary goal is to construct a robot that exhibits exceptional precision in its movement. It is essential for us to consistently know the robot's exact position in terms of x and y coordinates, as well as its theta (orientation). We aim for an accuracy of 1mm, which will enable precise actions during matches.
Motorization
We are utilizing two Brushless Motors (Aerodrive SK3 - 4250-350kv) coupled with a 10:1 planetary gear (originally designed for NEMA 17 stepper motors). This setup offers us an optimal balance of torque and speed.
For closed-loop motor control, a mount is used to join the motor to the reducer, with an encoder integrated into the assembly.
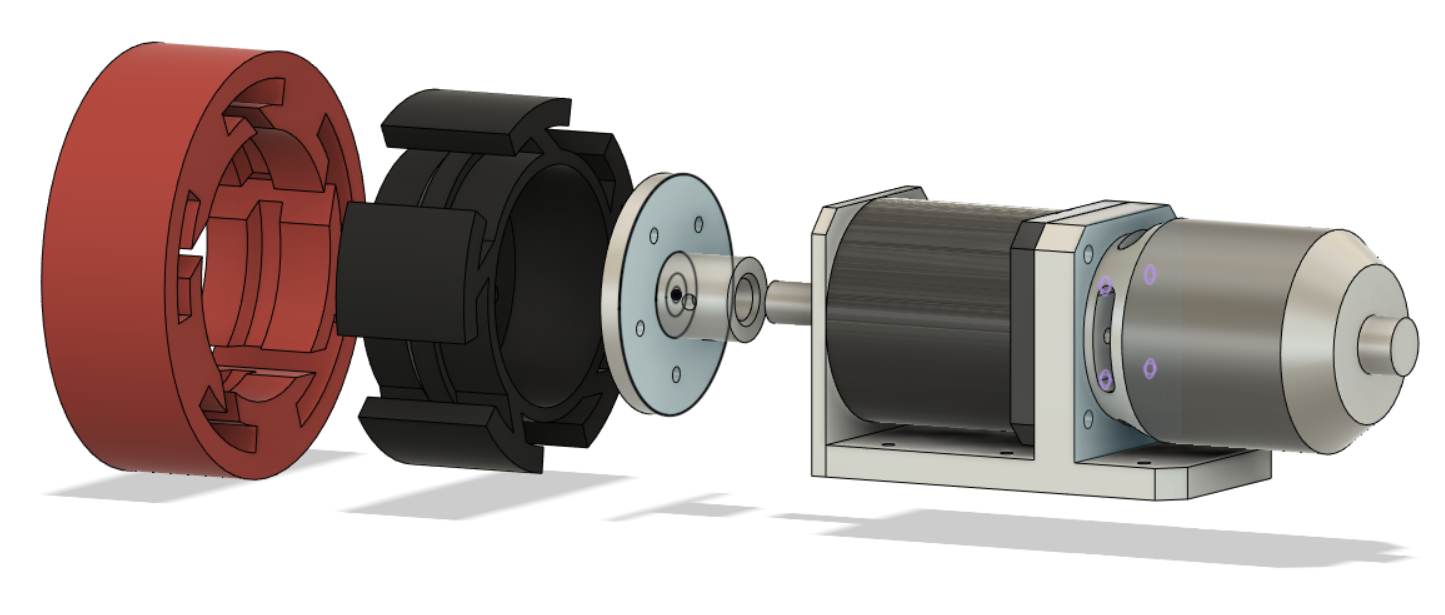
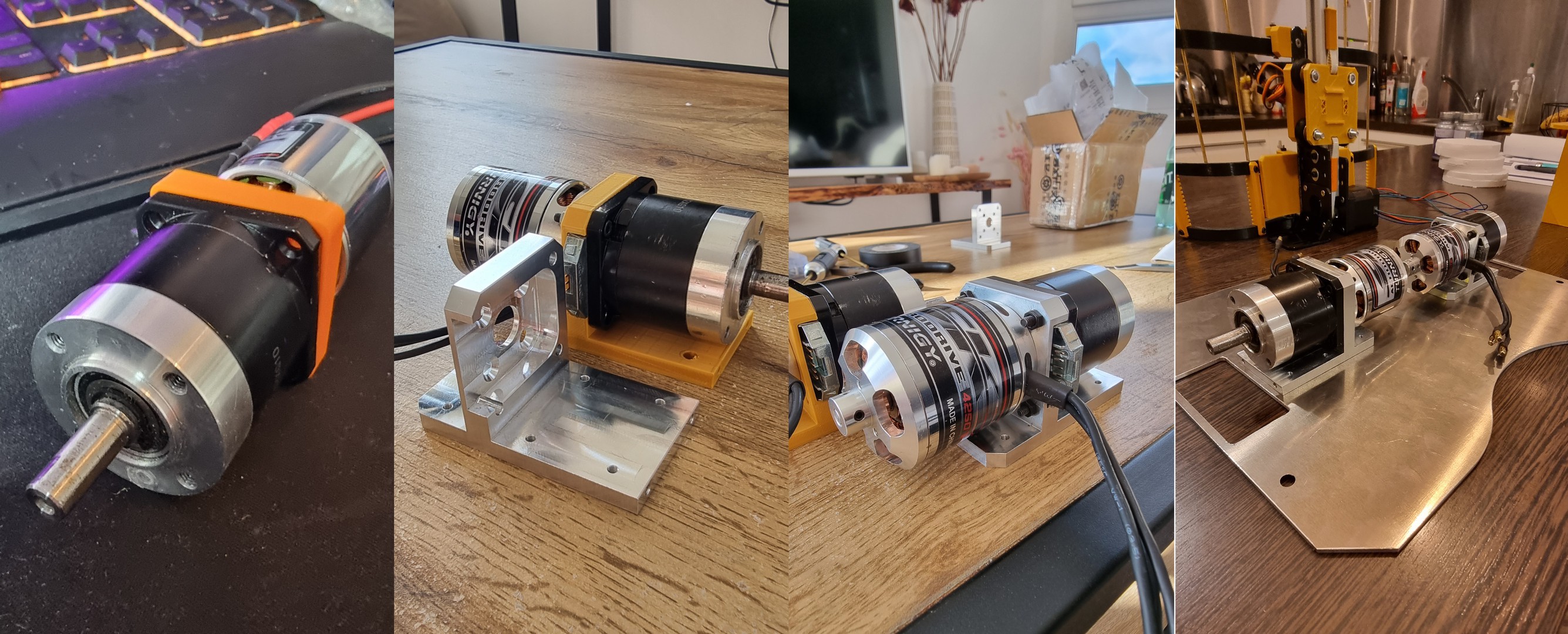
(This design was inspired by Skyentific)
Odrive
Both motors and encoders are directly connected to an Odrive 3.6 board. This advanced board enables fine-tuned control of the robot's movement. We can adjust parameters such as PID, acceleration, deceleration, velocity, and more, to achieve precise motion control. Furthermore, real-time feedback from the encoders can be broadcast on a ROS2 topic and utilized by our Python code.
All these aspects will be handled on the operating system side, empowering us to transmit dynamic commands to the robot based on sensor feedback, like from the LiDAR, enabling features such as obstacle avoidance."
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.