 Brian Brocken
Brian Brockenthe controller is an arduino nano.
the coreless motors used in this project are from a small toy rc helikopter.
the bearings for the gears are just tubes from an antenna and this works very good.
the parts are printed in PLA plastic.
I used superglue to glue al the pieces together.
The transistors used are some I had lying around.



 Cirmall
Cirmall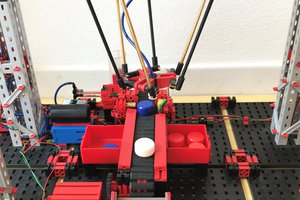
 davidatfsg
davidatfsg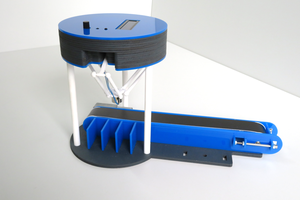
 Pascal Buerger
Pascal Buerger
have you considered using some sort of distance sensor or dropping the tether (not for the 1KB challenge, but for the sake of hacking) with like a infrared module?