 Petar Crnjak
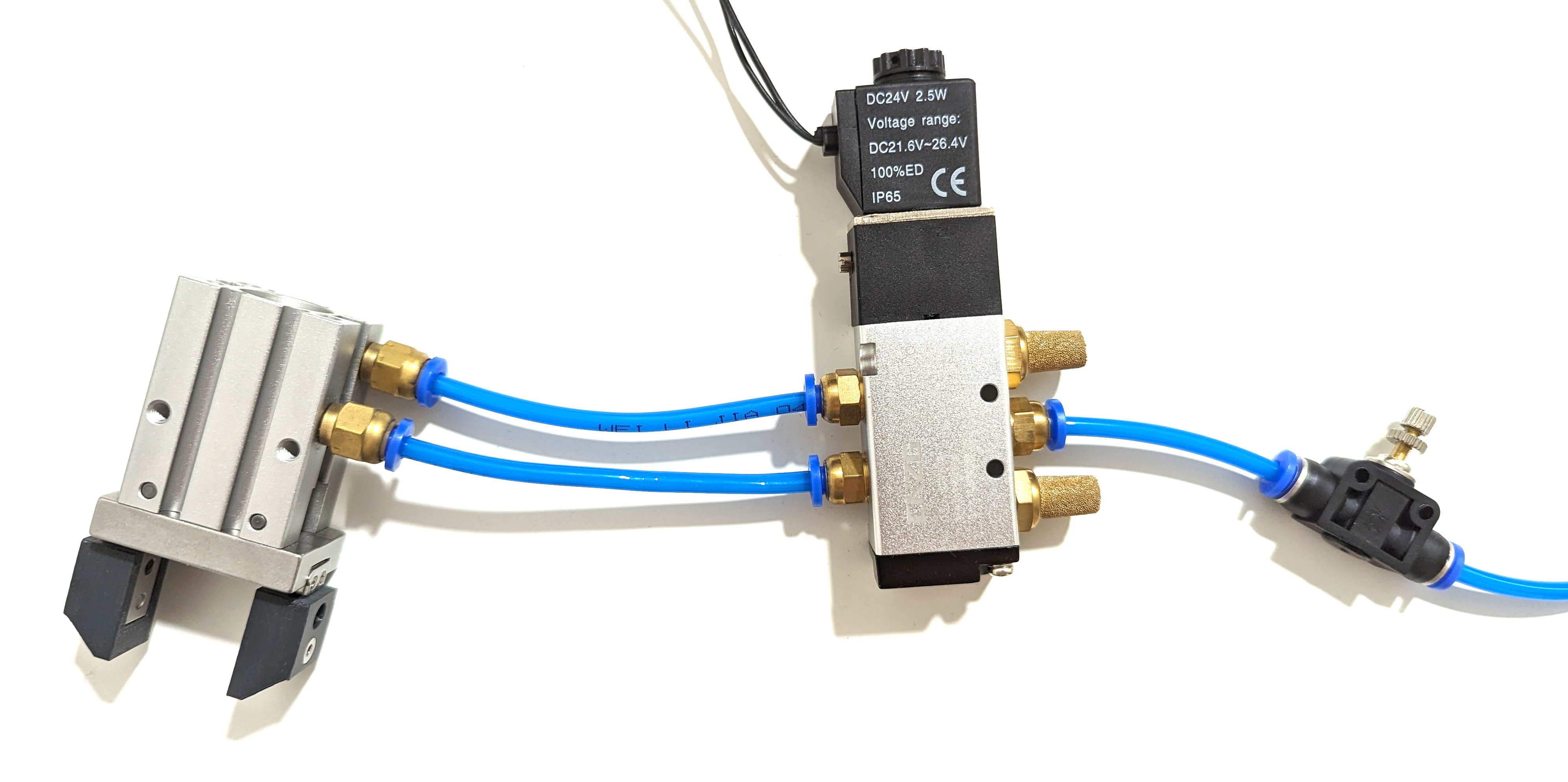
Petar CrnjakThe robot arm is not really useful without a way to interact with the world. That interaction is usually done with pneumatic or electric grippers. Pneumatic grippers are great: They are small and compact, and you can exert the exact force you want by controlling the pressure they are fast and robust. BUT they require a lot of equipment, expensive and LOUD compressors, pneumatic valves, tubing...
The solution to that is electric grippers.
While pneumatic grippers tend to offer higher gripping force compared to electric grippers, the latter are becoming increasingly robust each year. Despite their lower gripping force, electric grippers excel in granting users precise control over factors like speed, force, and position.
One notable advantage of many electric grippers is their object detection capability, which verifies successful part pickup. Moreover, electric grippers allow the management of grip force and closing speed. This attribute is particularly vital when handling delicate items that require gentle manipulation. Unlike conventional grippers that typically function with a full stroke, servo-electric grippers can be partially opened, enabling them to adeptly grasp a diverse array of parts varying in size.
For tasks demanding precise assembly, electric grippers prove to be an excellent choice. Similarly, scenarios involving part sorting necessitate grippers with adaptable capabilities to accommodate varying sizes and orientations. While advanced pneumatic grippers offer some of this flexibility, electric grippers surpass them with greater versatility and simplified adjustments for different object types.
Most manufacturing facilities have access to an air supply, simplifying the integration of pneumatic grippers. Nevertheless, the absence of an air supply requirement makes the deployment of electric grippers even more convenient, translating to lower operating costs. In applications demanding a clean environment, electric grippers emerge as the safer option, eliminating the risk of air leaks.
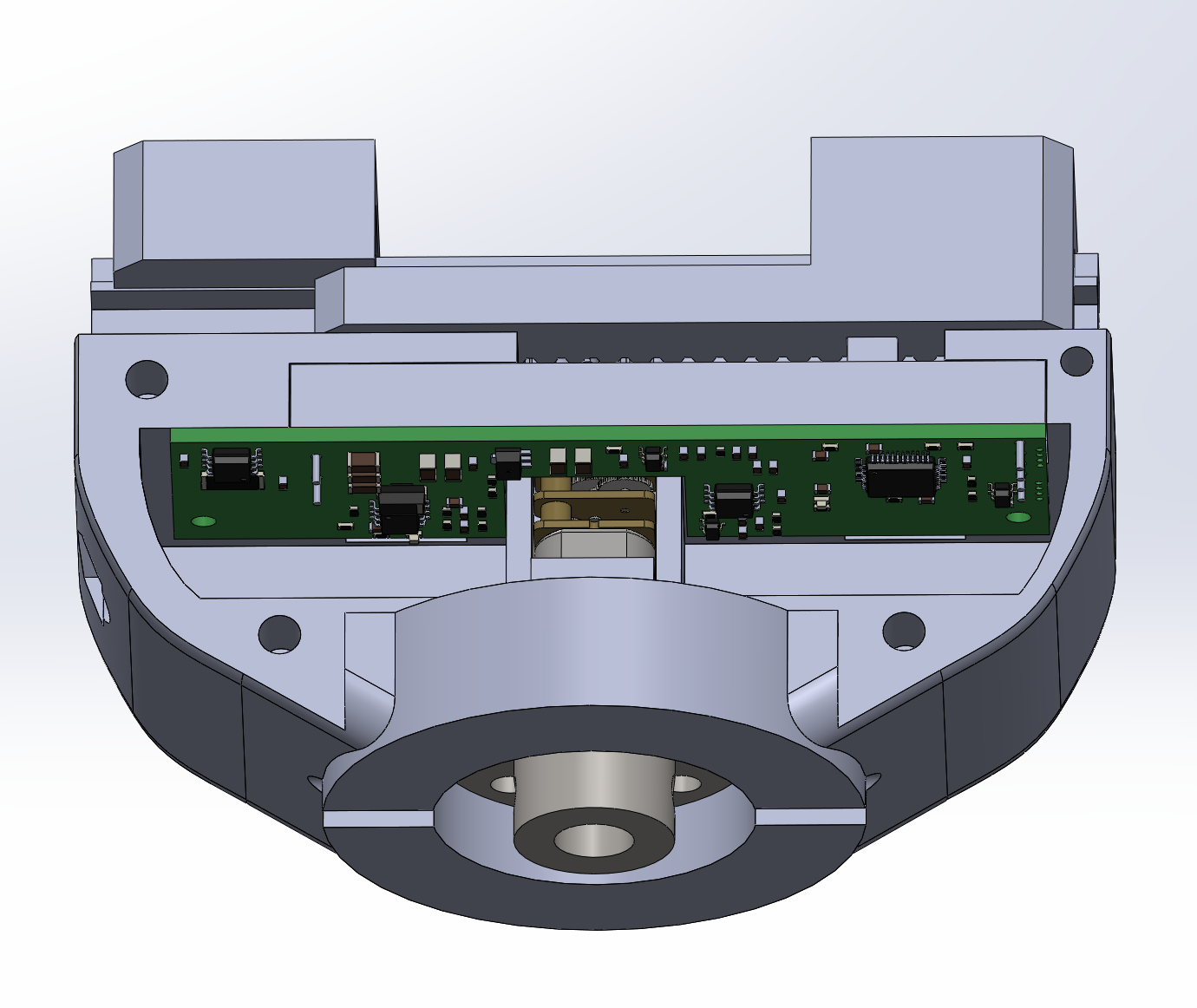
So electric grippers are the new hot stuff, but there are zero cheap or open-source grippers you can buy/make. Well, when designing PAROL6 I had that in mind and created a small compact electric gripper with force control.

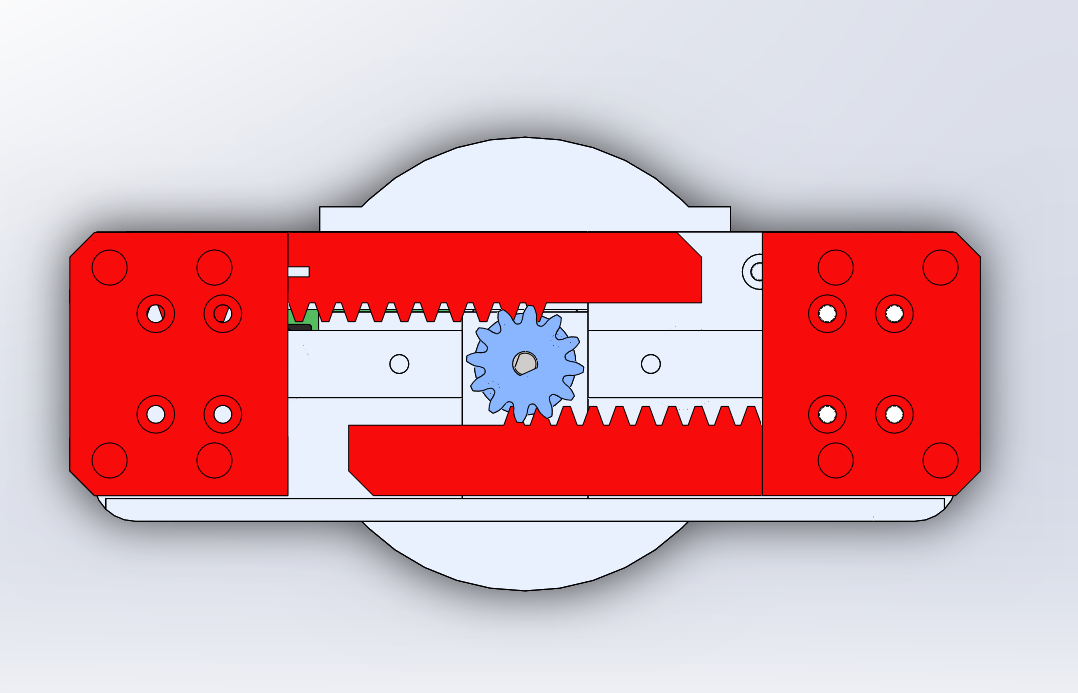
It uses a DC motor to actuate its jaws. Each jaw is connected to a rack that is in turn controlled by a pinion that is connected to the DC motor gearbox. To one of the racks is connected a linear potentiometer that allows precise position control. Torque control is done via shunt current sensing. Communication is done via the CAN bus.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.