 Petar Crnjak
Petar CrnjakPAROL6 commander software allows you to write simple robot arm scripts. The scripting language is called RBTscript. It allows you to move the robot in joint space or cartesian space, use delay functions, control outputs, grippers, read inputs, and much more!
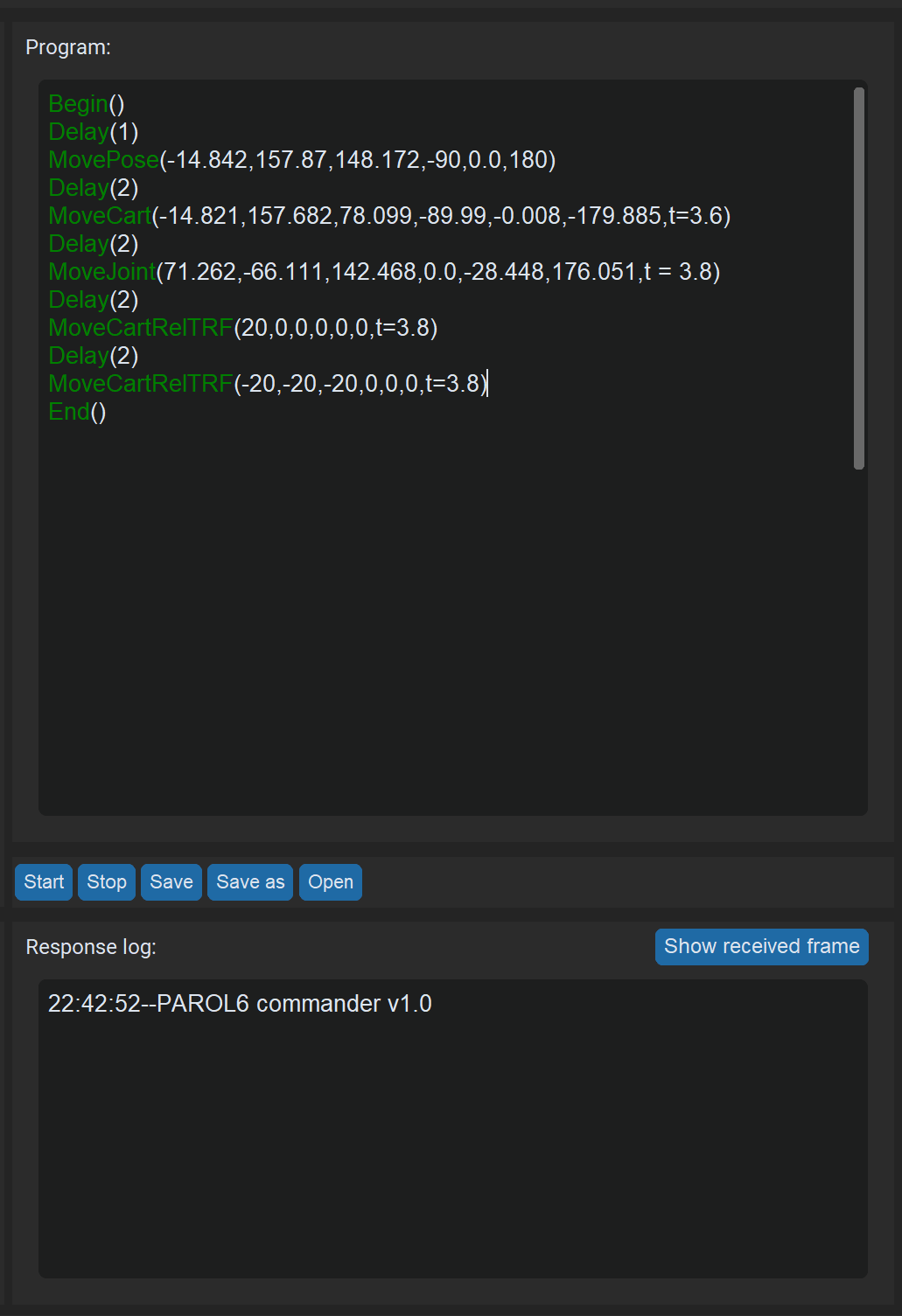
How are trajectories tracked?
Once the program starts it needs to generate and track commanded trajectories.
There are 2 ways we can command robots' trajectory here:
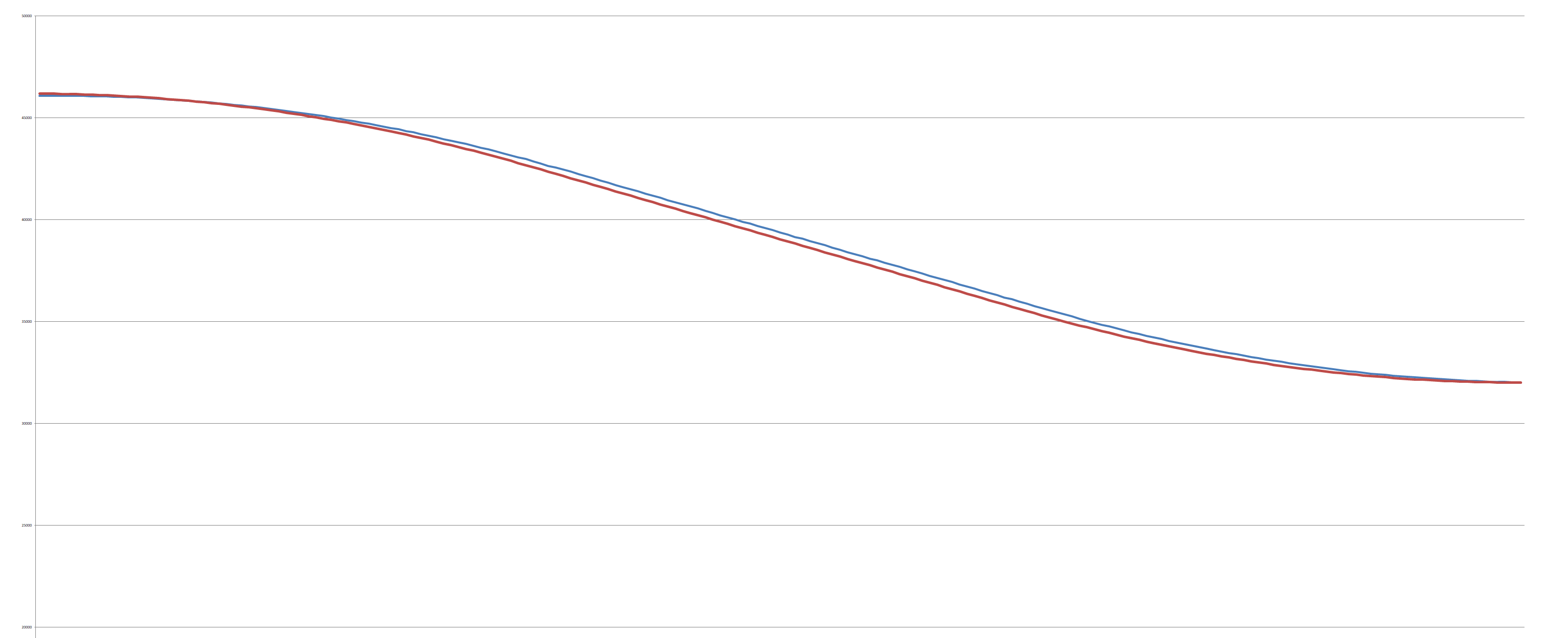
For example, we want joint 6 to move from 260 deg to 180 degrees. We want to follow trap velocity profile and get to 260 position in 2 seconds. We generated speed and position curves.
Now if we command only the speed curve robot will follow it perfectly but if the move is too long or too fast it will miss the demanded position. Why? We are sending commands every 10 ms. but it is not always exactly 10 ms since pc is not a real-time machine that time fluctuates. another thing is that steppers execute some really small speed moves from the beginning and the ends of the speed curve. Because of that position is missed usually. How to compensate for that? Use position curve. Use your current position and commanded position and calculate how fast you need to go. After that take that speed and add commanded speed and average that.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.