 Tamas Feher
Tamas FeherIn the earlier log, I broke down the project into smaller subsystems. This time let's analyze the first subsystem, the "Plate"
Let's narrow our options by specifying some requirements:- The whole assembly needs to fit in a 20cm diameter cylinder, so this is true for the plate as well.
- The sensing of the ball needs to have a high enough resolution that it can sense at least 100 marks in each direction. This is a control system good practice. With too low resolution the ball would jitter instead of holding the target. The earlier requirement set up a 20 cm diameter, so we can say that it needs to be able to detect within the accuracy of around +- 2 mm
- The sensing method should have a high enough refresh rate that it would achieve smooth operation. My usual rule of thumb is to use at least a 100 Hz refresh rate for mechanical control systems. This means anything that involves F=m*a.
Given the requirements, I started researching touch-based sensing technologies. I selected 3 touch-based technologies that I would like to run up against each other:
- Resistive touch sensing:
In a resistive touch screen, there are 2 conductive films separated by a thin layer of air gap. Once something applies pressure to the top film, the contact is made by the 2 conductive surfaces. opposing edges of the films are connected to electrodes, so if a voltage is applied across them, with the contact point it forms a voltage divider. The voltage can be measured and from there the touch location can be interpreted.

The benefit of this technology is that it is very simple to control and widely available. However the downside so far I've only seen rectangular units being produced, and the ball needs to be heavy enough to overcome the stiffness of the top surface.
- Capacitive touch sensing:
In this case, we are interested in a capacitive touch array instead of individual touch buttons.
Capacitive touch arrays operate on the principle that a finger (or a conductive material) would disrupt the electrostatic field around the electrode, and change the capacitance between the TX and RX electrodes. This change in capacitance is recorded as a touch input.
 This is the technology used in smartphones to detect user input.
This is the technology used in smartphones to detect user input.
The benefit of this technology is that it can be all self-contained on a PCB, allowing any form factor. However, the downsides are that the ball needs to be conductive, and it requires more advanced PCB design.
- Infrared touch sensing:
On the edge of the touch surface, rows of infrared emitters and receivers are populated at the position of the touch, the beams are blocked by the object, registering a touch point.
 The benefit of this technology is that it does not impose any major restrictions neither on the surface, nor on the ball. The downside is that it requires a border around the perimeter of the plate, which would be visually unappealing.
The benefit of this technology is that it does not impose any major restrictions neither on the surface, nor on the ball. The downside is that it requires a border around the perimeter of the plate, which would be visually unappealing.
- Optical tracking.
As a last technology, I chose to evaluate machine vision, as it's a common technique in ball-balancing projects.
Unfortunately, it means a camera needs to be mounted high above the plate. this would impose aesthetic issues, also restricting the material selection for both the plane and the ball.
I won't go into other touch-sensing technologies such as Surface acoustic waves, or projected capacitance methods, as they go over my head way too far for me to understand them.
Now that we've set up the contesting technologies, a decision needs to be made on which one to pursue further. My usual method for this is using the decision-matrix method.
In this method, measures of performance (MoP for short) are assigned to the technologies. In this case, I chose a scale from 1 to 5, where 1 is the worst performance and 5 is the best.
Once the ratings are established for all technologies and all MoPs, the scores can be summed together. The highest-scoring technology wins.
The choice of MoPs is individual to the project and the environment, so choose your own MoPs if you would like to try this method.
I chose:
- Cost
- Time to Prototype (how long it takes to finish a prototype)
- Visual appeal (how much of an eyesore it is)
Given these MoPs, here is the decision matrix:
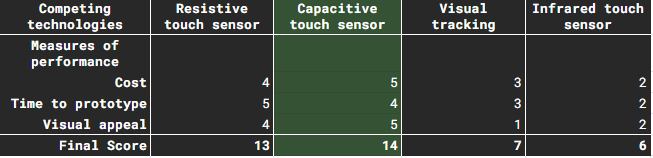
You can see in the table that even if the resistive touch sensor is the easier to implement, The capacitive touch sensor wins as it's more cost-effective, and enables a thinner plate to be used.
Note from the future: As I'm moving deeper into the design, cost-effectiveness becomes less of an advantage over resistive touch screens, but let's see how it turns out.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.