 Adan
Adan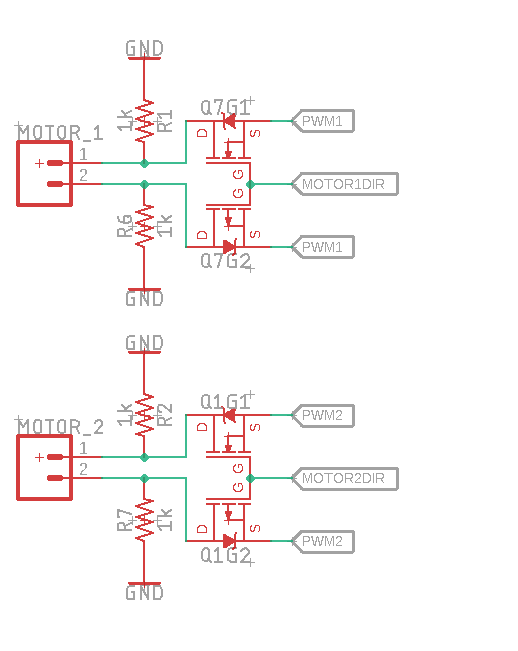
complimentary pair MOSFETs. sacrificing a bit of RPM because now the motors will run at 3.3V, I resolved my conundrum. now I'm only using 4 PWM channels and using another pin to control direction. When the direction line is low, the PNP side will be PWM and the other is pulled to ground and when it's high, the NPN side will be PWM and the other pulled to ground. Should save a bit of space too.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.