deʃhipu
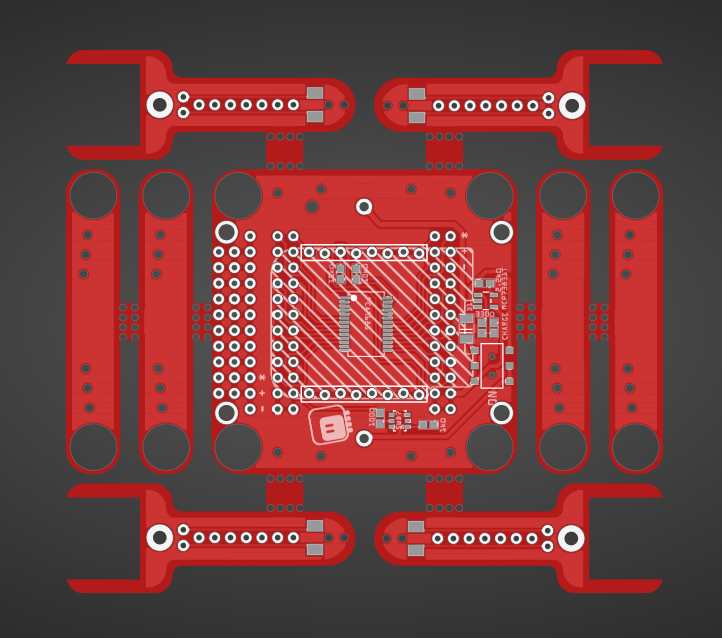
deʃhipuThis is the next step of evolution of #Tote and #Tote HaD, the spider robots that were designed to be as simple and easy to build as possible, without sacrificing the proper walking algorithms. This time the focus is on making it easier to program and to modify by attaching additional hardware.
While Tote was focusing on building a proper quadruped robot without special materials and tools and as cheaply as possible, the subsequent projects focus on making the robot more reliable and easier to experiment with. The #SpiderWing project loosens the budget constraints, aiming to make a sturdier, stronger and more consistently reproducible robot. This project works in parallel to that, trying to incorporate the same improvements, but without rising the price too much. The two projects are meant to cover the conflicting needs of hobby robot developers.
Of course, the overarching goal for both of them is to stimulate research in affordable and reliable legged robots, so that we can have devices like this at our homes one day.