 J. Ian Lindsay
J. Ian LindsayThe team
Digitabulum is Manuvr's flagship project. Here is out team.
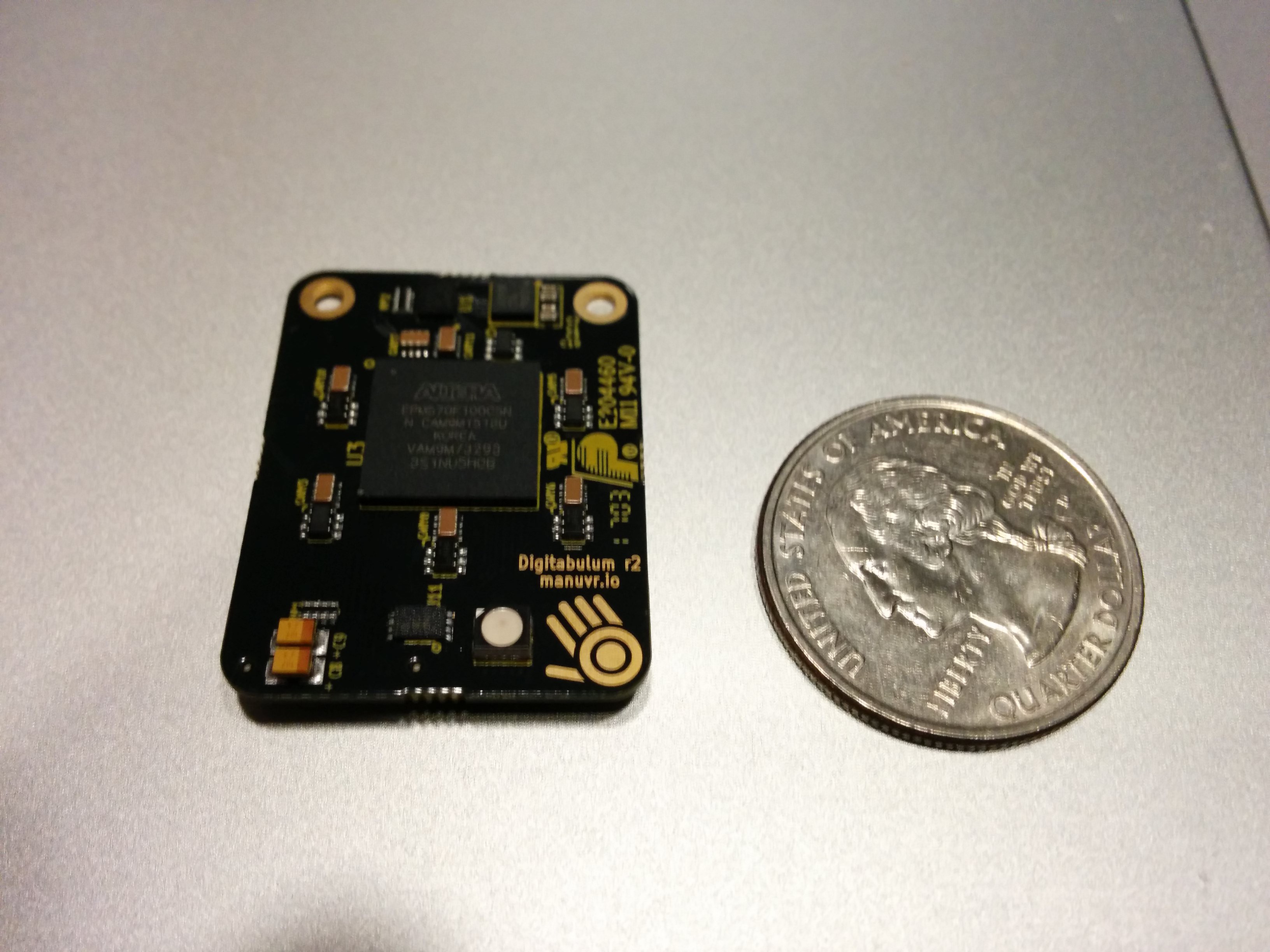
Ian Lindsay started the project in 2014, and is the hardware designer and low-level bit-pusher.
Brent Long builds 3D augmented-reality applications.
Josh Treadwell is an electronic musician/producer.
Javascript programmers, all.
Core-values
If it isn't open-source, it isn't worth investing the brain-space to learn. All the firmware is on our github page along with instructions for building it. If the release goes well, we will also post hardware details.
We don't care to pick a "target-market". We would prefer to give creative people good tools to define the markets that everyone else is hung-up on chasing.
Your hands are your own, and no one can possibly code for every conceivable use you have for them. We've watched many companies die trying.
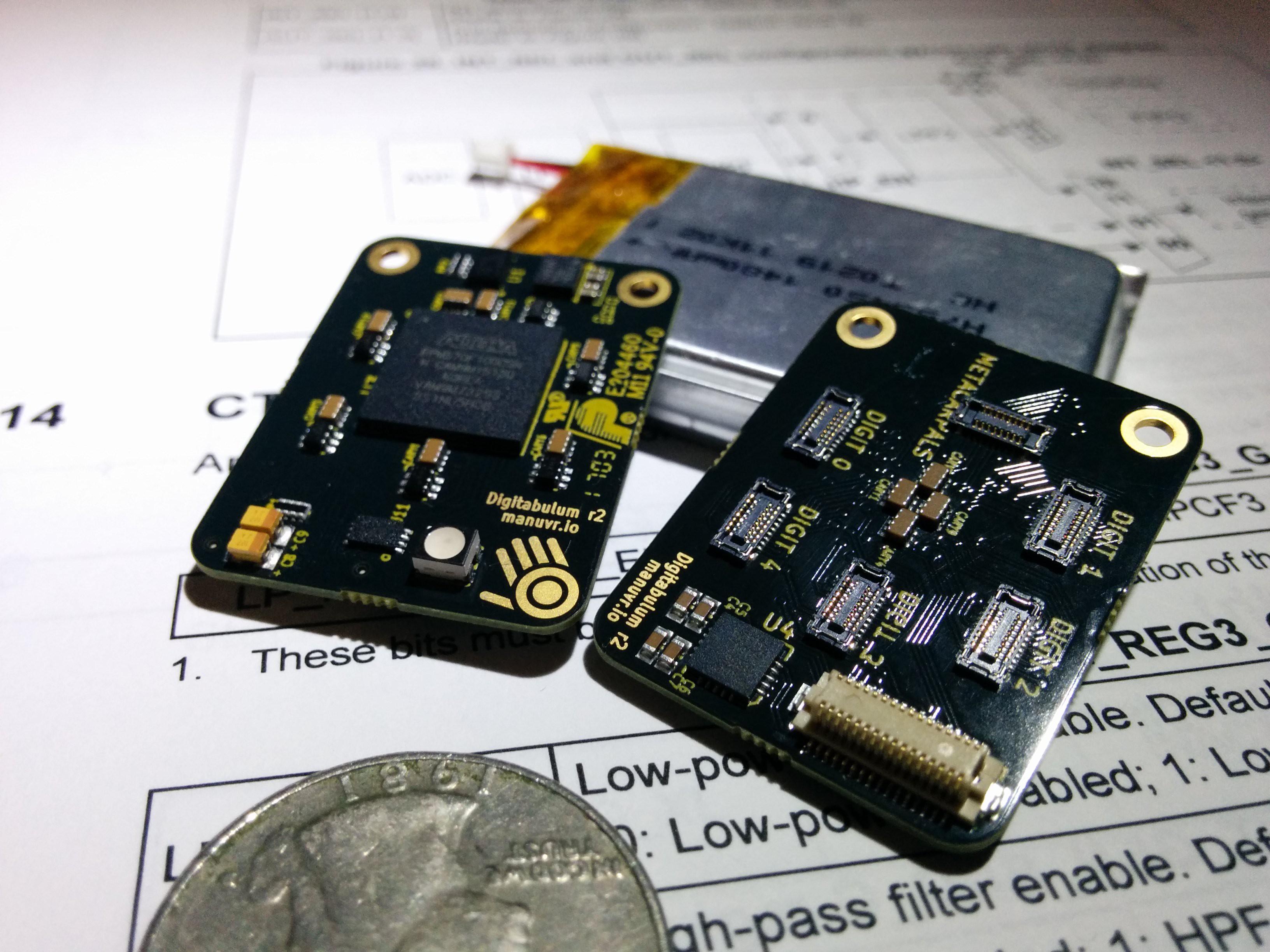
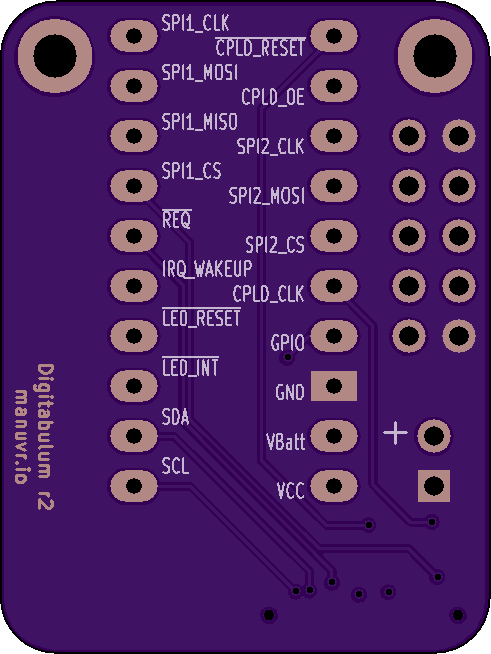
We designed the glove with an expansion port for the sake of novel hardware so that better tools can be developed and shared.
Defense of design
Why are you trying to capture a hand?
The designer's Statement of perspective along with what may be the single most valuable thing that could be done with this technology.
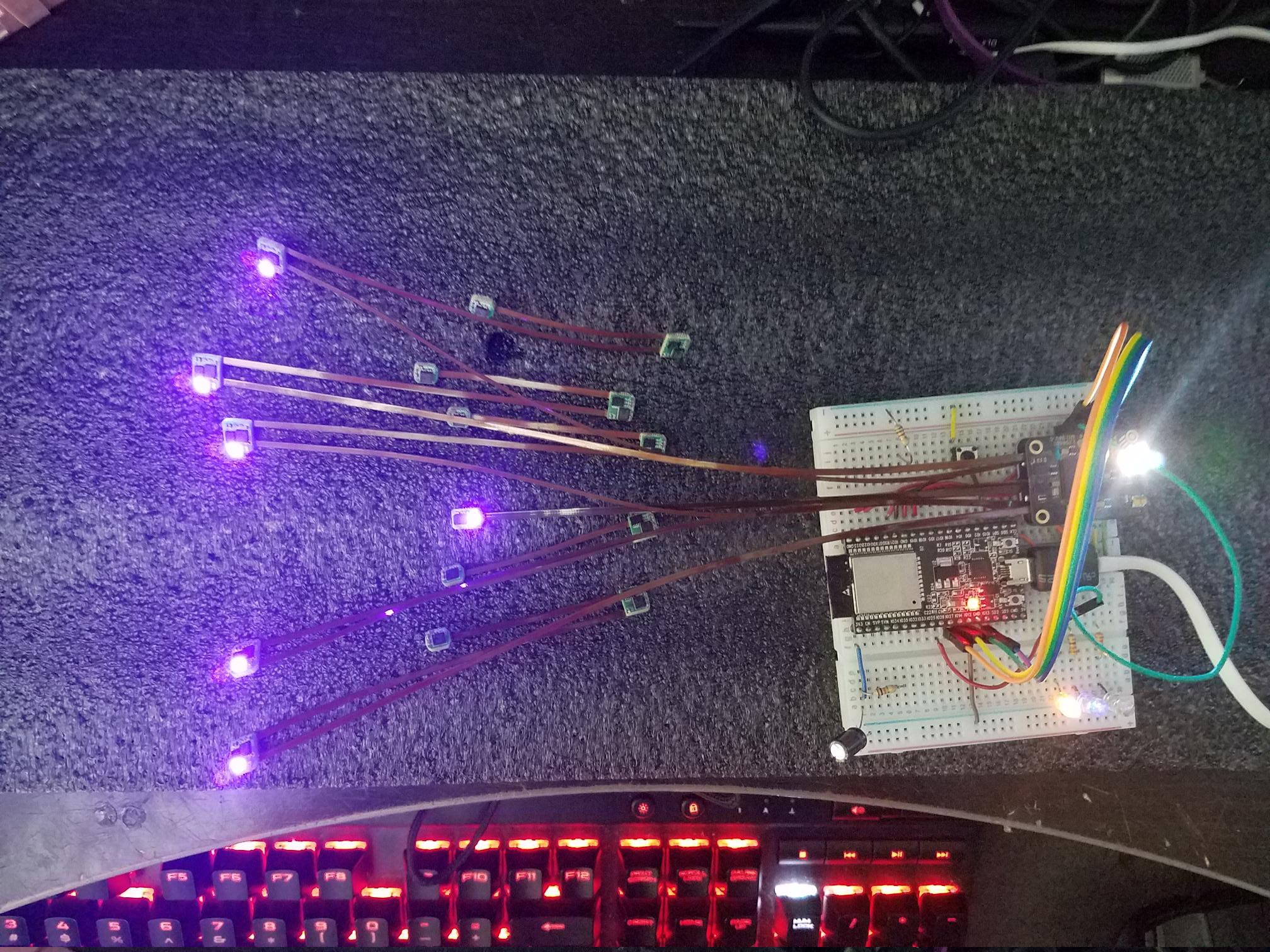
Also, Ian wants to play dubstep with it.
Alright... How are you going to capture a hand? Defend your choices.
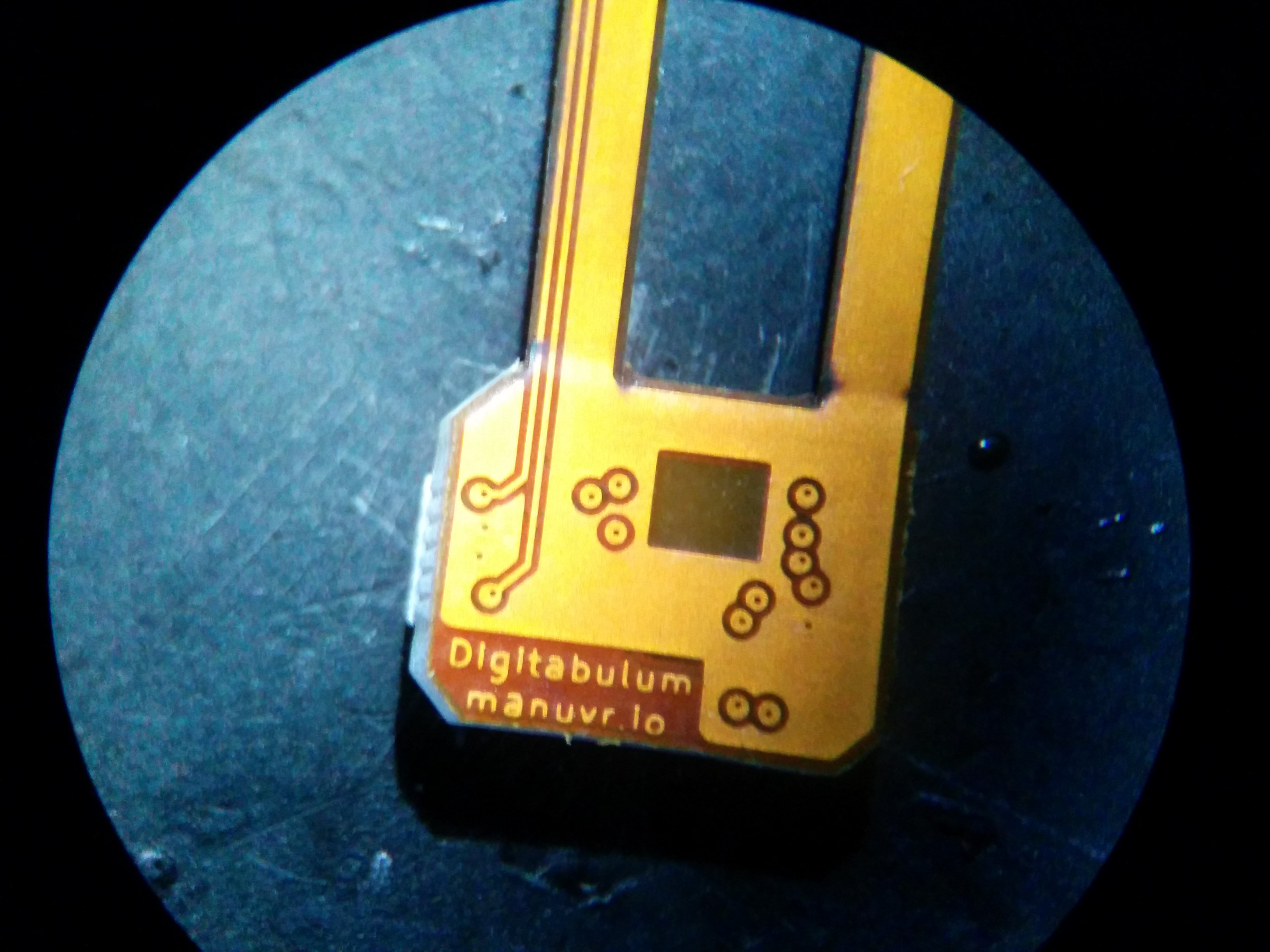
What sensors to use.
How co$t was balanced, and my definition of a good tool.
And the best strategy I could think of to make it as cheap as possible without making it garbage.
Other information
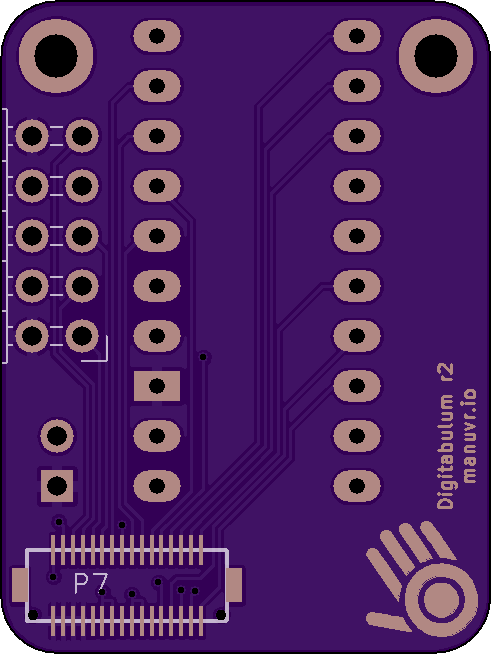
KiCAD template for custom bases.
Videos of our team working problems and presenting ideas.
The glove's Trello board. It is updated infrequently, but is still updated.
The same caveat applies to the LibManuvr Trello board.
The firmware on the glove is composed of two original projects: ManuvrOS and Digitabulum-Firmware. Both projects are hosted on Manuvr's github page.





 Boz
Boz
 Bruno Laurencich
Bruno Laurencich
 Pavel Zhovner
Pavel Zhovner
 AVR
AVR
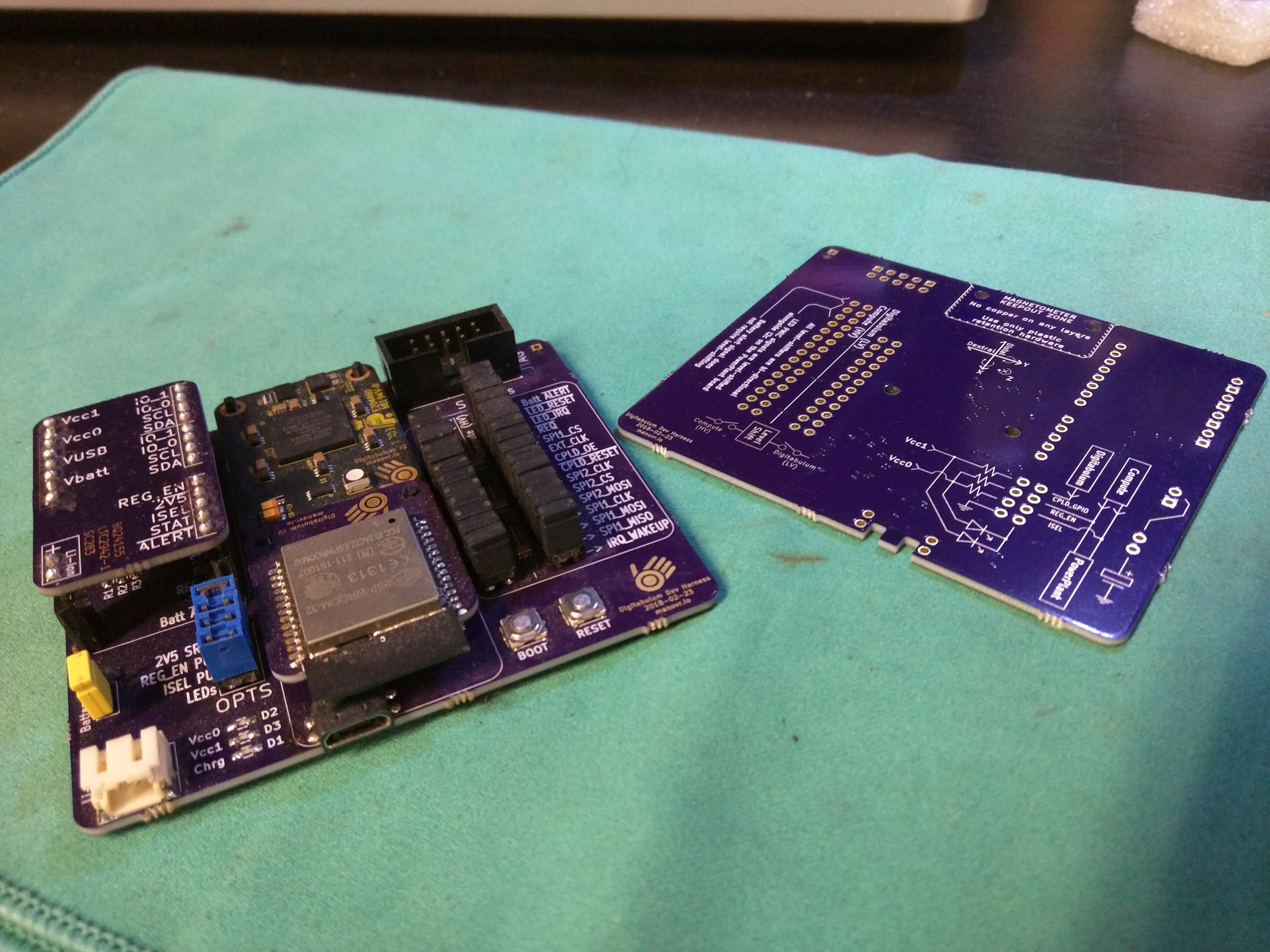
The r2 boards should arrive tomorrow. So excited!