 alexw
alexw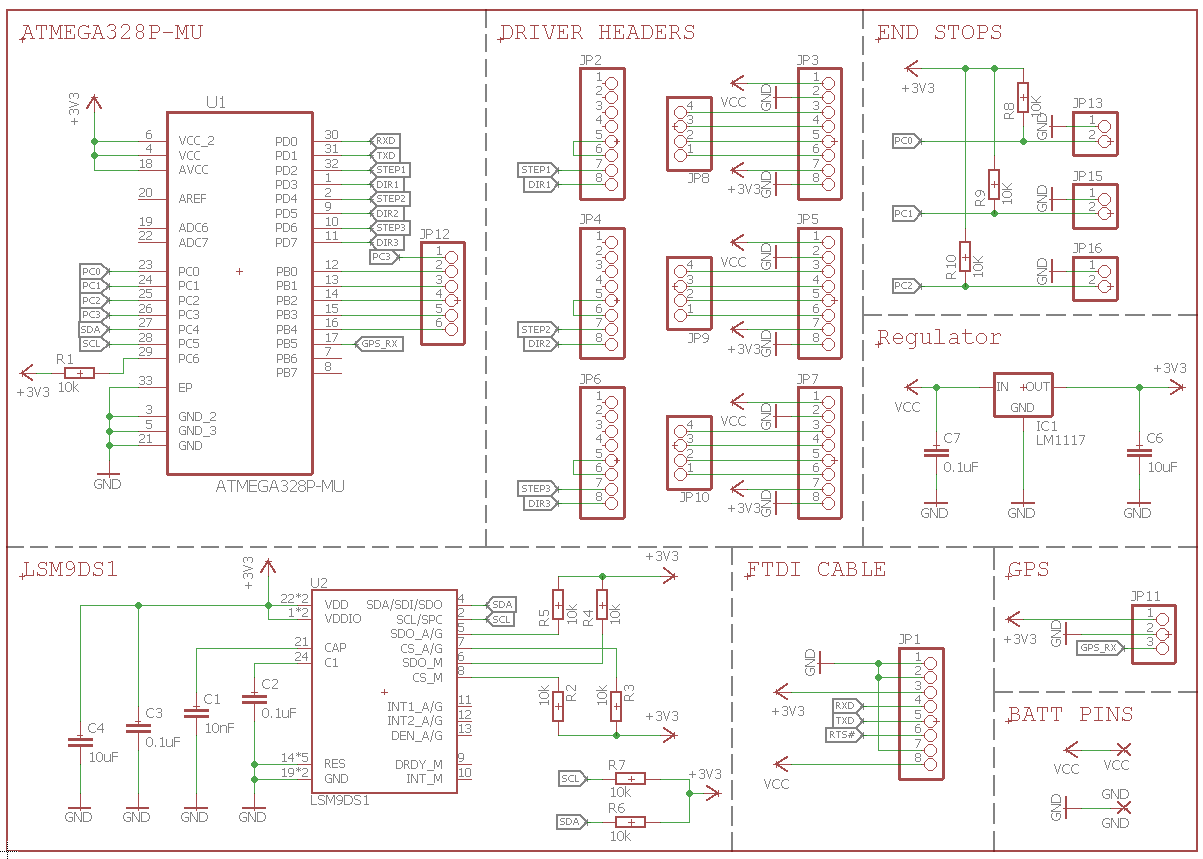
As I have had a small amount of prior experience using Eagle, I decided to develop the PCB within Eagle. The initial schematic was relatively quick to produce as the microcontroller and IMU both had schematics available online that were suitable. The majority of the schematic is taken up by headers to connect the FTDI/A4988s.
There are many barebones Arduino tutorials available, so I was able to quickly produce a circuit for the atmega. Using the internal oscillator (8MHz) and only allowing it to be programmed via an FTDI cable, I was able to reduce the number of components massively.
The LSM9DS1 IMU has a open-source breakout board produced by SparkFun which I used in tandem with the IMU datasheet to produce an sub-system circuit quickly. The IMU eagle library can be found on SparkFun's GitHub here. The ATMEGA328P-MU package is found in the library by element 14, found here. (This requires an account to download).
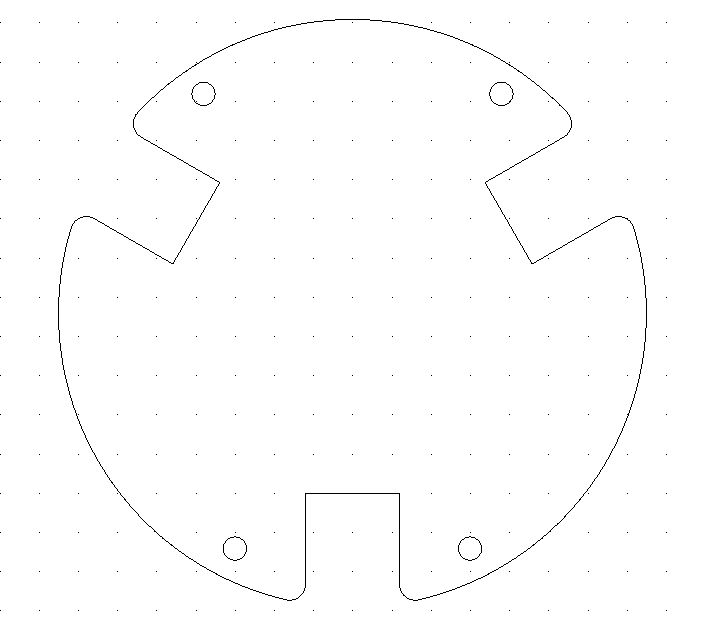
I intend for the PCB to be produced on a board that fits within the glider tubing; above is a DXF board outline that will be imported into Eagle. Over the next couple of weeks I'll produce the control board and update the project as it becomes complete.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.