Radomir came up with the great idea to use a retroreflector instead of the chrome cylinder I had in my basic concept. As Radomir mentioned you can get then as such a reflective stick e.g. for bicycles. Although I'm just in the concept phase and have whether the electronics nor the mechanics ready here is a very basic investigation:
The setup is a line laser which rotates, a LDR and a DSO.
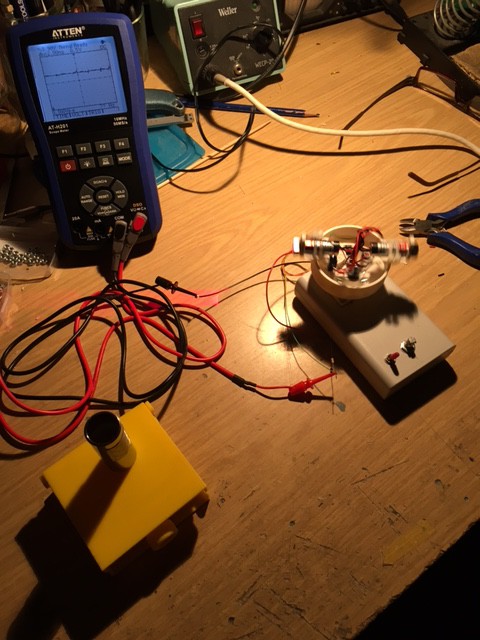 Of course doesn't the setup works for high frequencies. In front the cylinder on one side with the sticker (which are fairly expensive!) and on the other side bare.
Of course doesn't the setup works for high frequencies. In front the cylinder on one side with the sticker (which are fairly expensive!) and on the other side bare.
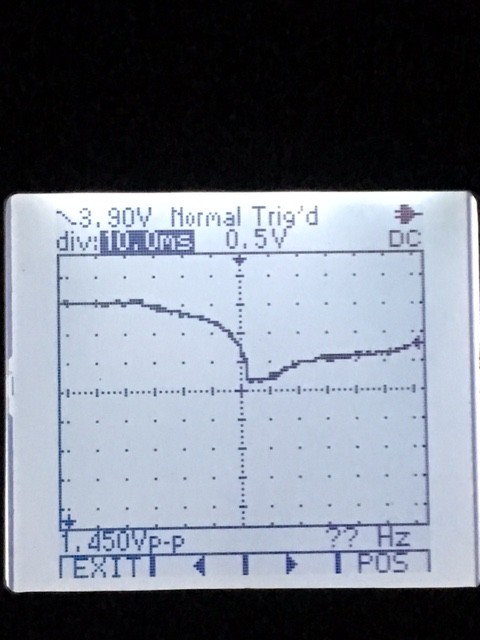
The response with sticker:
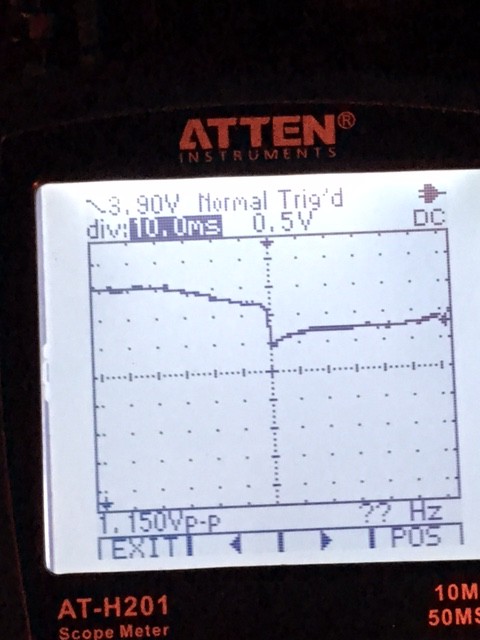
 and the response without sticker:
and the response without sticker:
 resp. the response without sticker with a lower time base:
resp. the response without sticker with a lower time base:
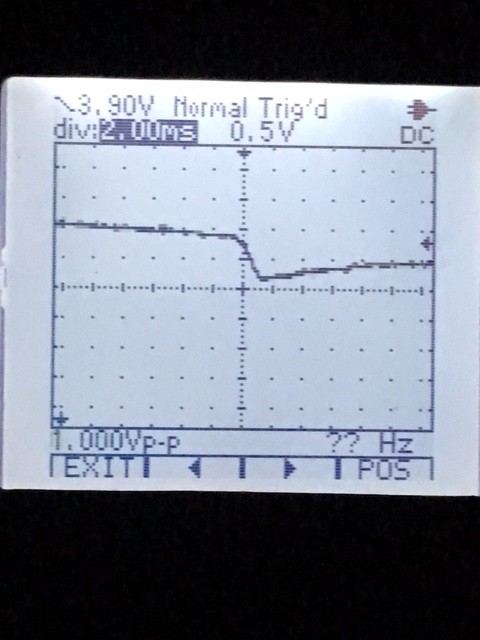 My setup isn't usable for high frequencies and my workbench scatter a lot of light back. That's why anything else than a proper pulse is shown on the DSO. But however it shows clearly that the pulse with the sticker becomes wider and it looks that the sticker reflects even a little bit more light. So great idea that really works. It adds a lot of visibility to the concept as reflectors with a far bigger radius can be used which lowers the frequency resp. increase the potential rotation speed .
My setup isn't usable for high frequencies and my workbench scatter a lot of light back. That's why anything else than a proper pulse is shown on the DSO. But however it shows clearly that the pulse with the sticker becomes wider and it looks that the sticker reflects even a little bit more light. So great idea that really works. It adds a lot of visibility to the concept as reflectors with a far bigger radius can be used which lowers the frequency resp. increase the potential rotation speed .
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.