 Husarion
HusarionHere is the list of improvements made in ROSbot 2.0 - autonomous robot development platform:
1) unused ports from CORE2-ROS are now accessible on ROSbot chassis, so you can add the external modules to your ROSbot thanks to:
- 2x host USB
- 1x USB serial (powered by FTDI chip)
- HDMI
- Li-Ion charger connector
- Extension port (12 x GPIO, 7 x ADC, SPI, I2C, UART, 2 x ext. interrupt)
- sensor port (4 x GPIO, ADC/ext. interrupt, I2C/UART, 5 V out)
- 6 x servo port with selectable supply voltage (5 / 6 / 7.4 / 8.6 V) 3 A cont./4.5 A max. current for all servos together
- hCfg button for Wi-Fi config, 3 LED's and a power switch

2) LiDAR and camera cables are hidden inside chassis
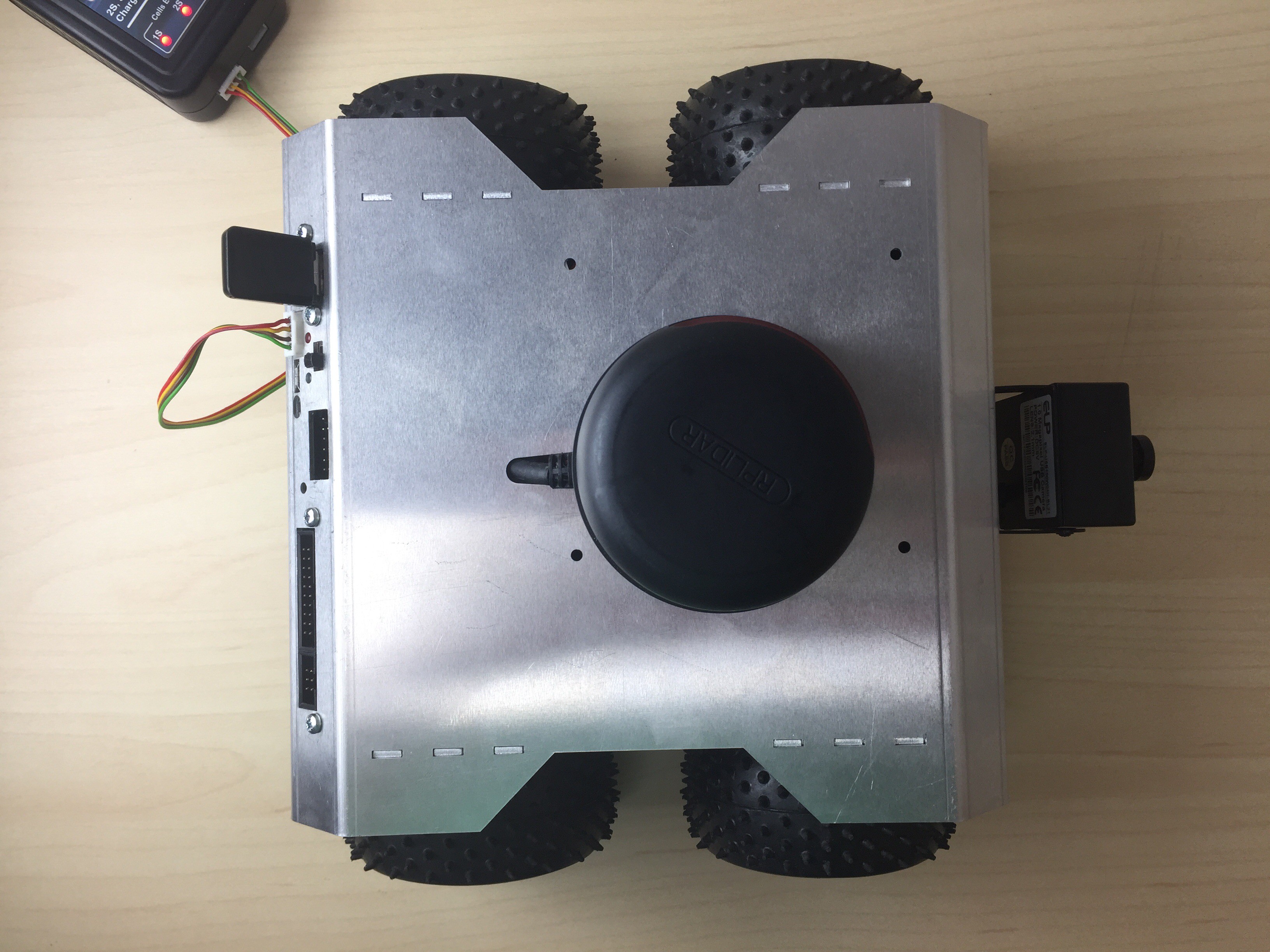 3) In the default configuration ROSbot includes CORE2-ROS with ASUS Tinker Board instead of Raspberry Pi 3 because of high computing power needed to realize advanced ROS functions (eg. SLAM navigation)
3) In the default configuration ROSbot includes CORE2-ROS with ASUS Tinker Board instead of Raspberry Pi 3 because of high computing power needed to realize advanced ROS functions (eg. SLAM navigation)
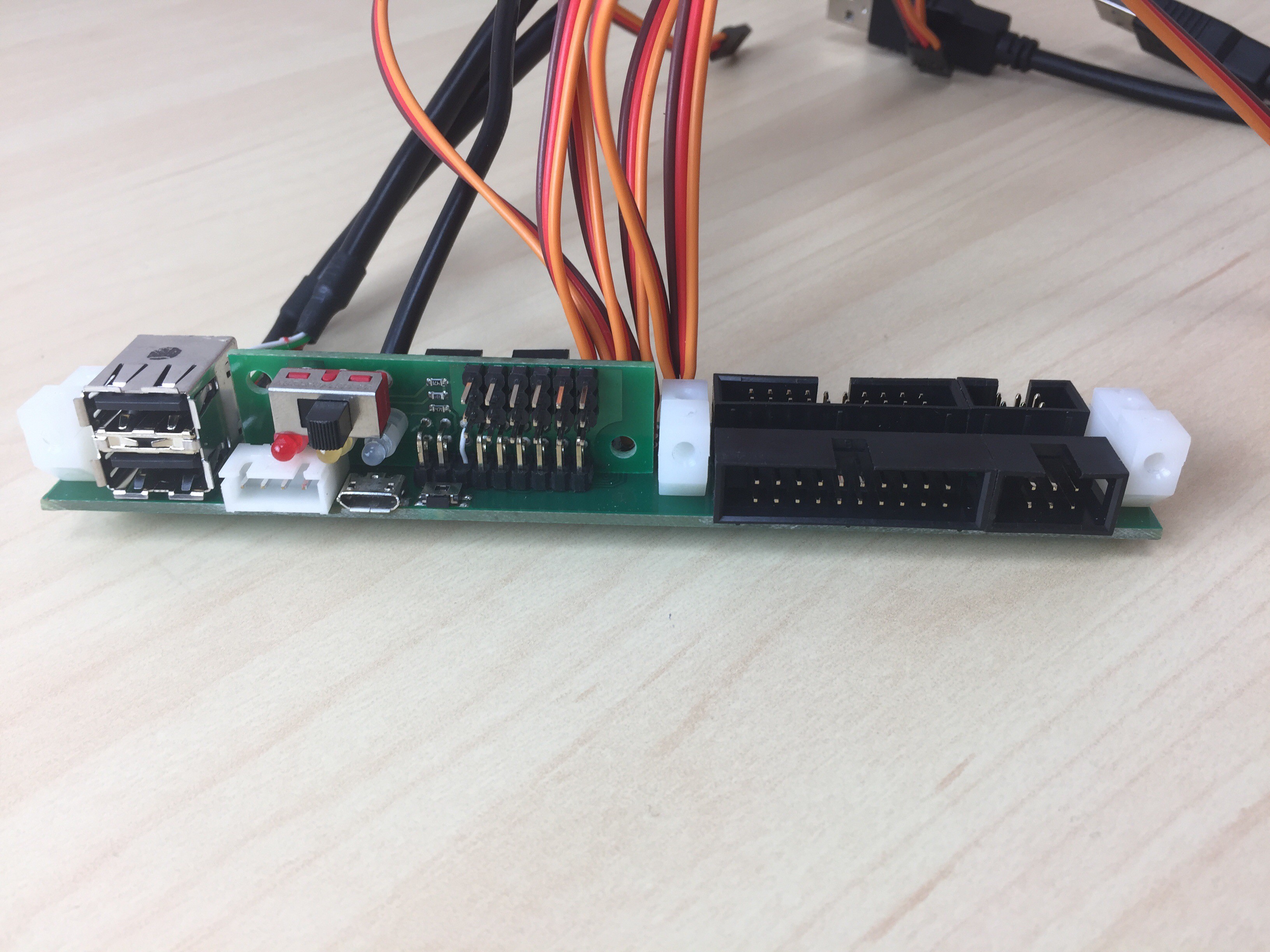
Because the charger connector and unused ports are accessible from the ROSbot chassis you don't need to remove the cover to charge Li-Ion batteries or add your own modules. To make it possible, we designed this additional adapter board:
ROSbot is a nice alternative to Turtlebot if you want to learn more about ROS, experiment with robot swarms or make your own autonomous robots. We hope ROSbot - autonomous robot development platform for hackers - will be a base for your new robotic projects.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.