0%
0%
ZeroBot - Raspberry Pi Zero FPV Robot
Raspberry Pi Zero 3D Printed Video Streaming Robot
 Max.K
Max.KBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
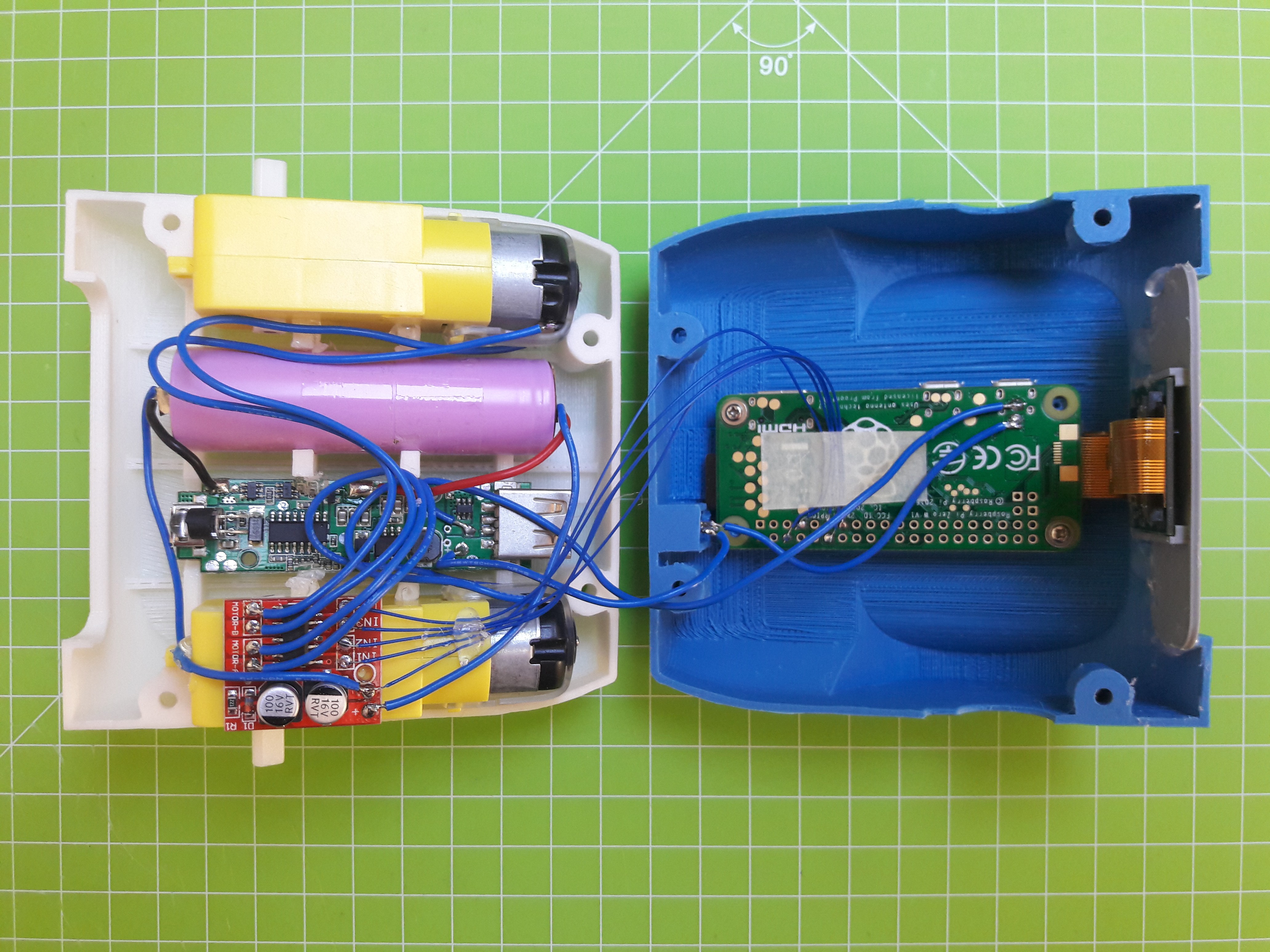
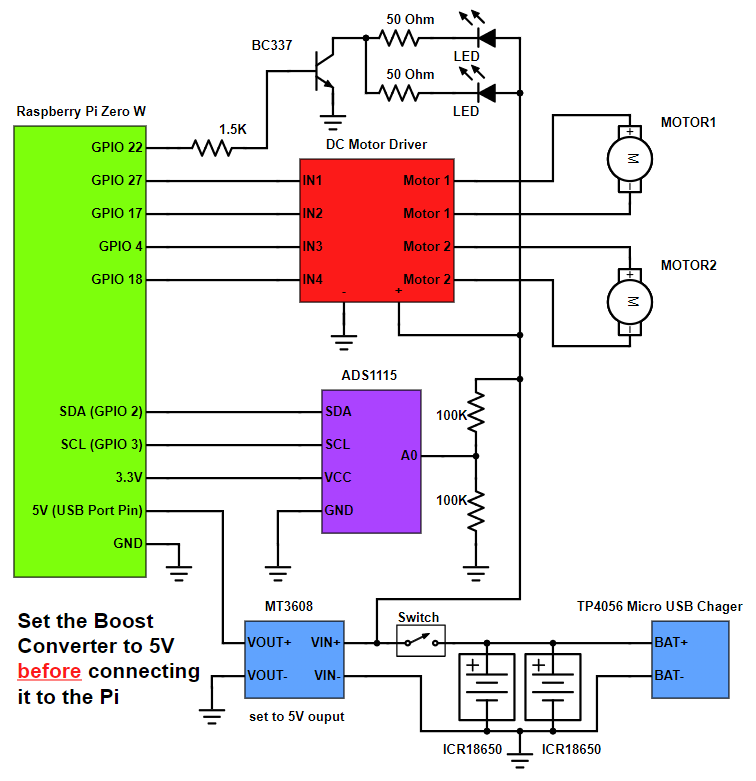 In case you are not familiar with this: The schematic is optimized for readability. You don't have to use this exact wiring (e.g. connection LEDs to ADS1115) as long as the electrical connections stay the same. For the wire gauges, use around 22 AWG wire for the signal connections and slightly thicker wire for the batteries and motors.
In case you are not familiar with this: The schematic is optimized for readability. You don't have to use this exact wiring (e.g. connection LEDs to ADS1115) as long as the electrical connections stay the same. For the wire gauges, use around 22 AWG wire for the signal connections and slightly thicker wire for the batteries and motors.









 Jacquin
Jacquin
 M.Frouin
M.Frouin
 Wes Freeman
Wes Freeman
 Robbie
Robbie
Hi.
I am finishing mounting the ZeroBot Pro, but I have 2 problems:
The first is that when I'm going to move it, so that it moves forward, in the interface, I have to do it to the left, back, to the right, it's as if it was changed.
And the second problem is the LEDs (5mm white) of the headlights, I connect it according to the diagram (or I think), ADS1115 with 100k resistance to the positive of the driver motor and that same cable to a negative of a led (another cable will join the negative poles of the 2 leds). The positives of the LEDs with 50ohm resistors, join and go to the collector pin of the BC337 transistor, the emitter pin of the BC337 to the battery negative and the base pin with a resistance of 1.5k to the gpio22 of the Raspberry.
I do not find where the problem is in the assembly, to see if you can help me.
Thank you.