When the Wild Thumper Robot is driving around my home there are some areas where it shouldn't go because of e.g. cables lying around which are too thin for the sensors to spot. Same for my Neato Botvac robot vacuum. The Neato people solved that by the use of a magnetic strip. The vacuum is not allowed to driver over it. I want my Wild Thumper to honor the same limits. Problem is the relative high distance of 6-7cm between the sensor position and the ground:
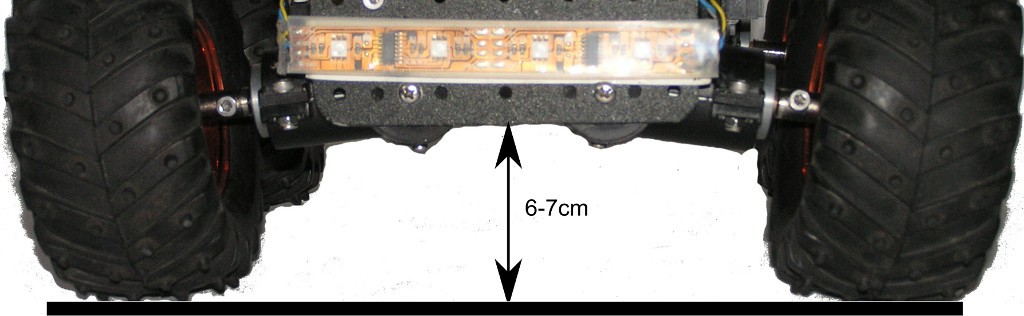
The distance is too high for usual magnetic sensors like reed switches or Hall effect sensors, but not high enough for a magnetometer since they need to be sensitive enough to measure the earth magnetic field for their use as compass sensors. Luckily I still had an old CMPS10 IMU lying around which does the job perfectly. From now on the Wild Thumper can stop at the same areas as the vacuum cleaner.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.