 Dennis
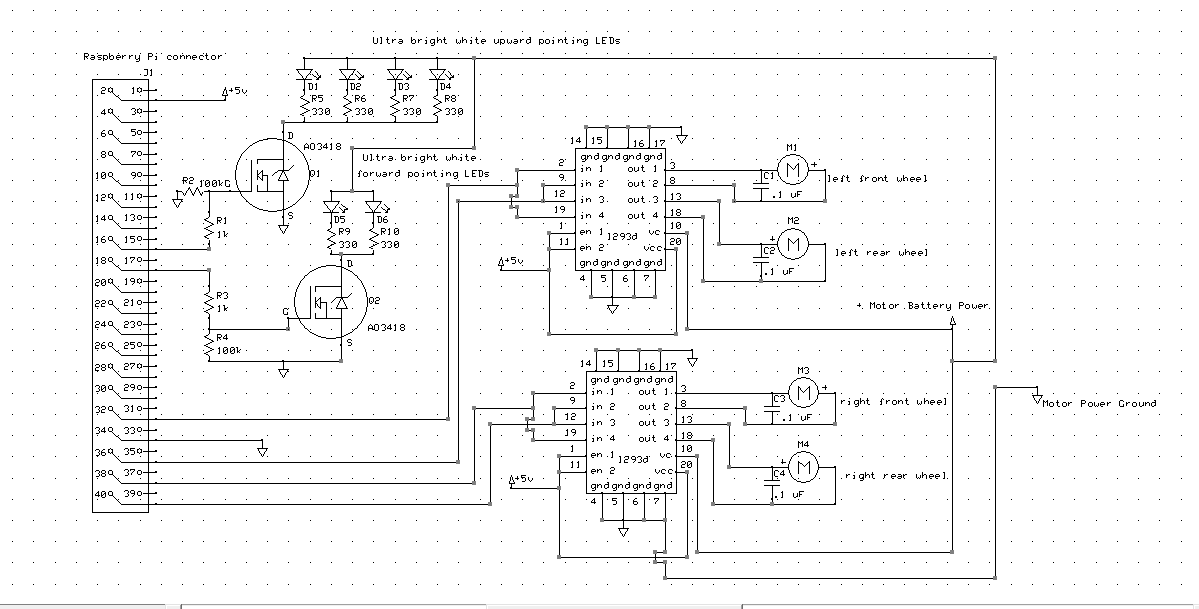
DennisInspectorBot’s motor drive is based on the L293d dual h-bridge. As a 4-wheel drive robot, InspectorBot has four gearhead motors--one for each wheel. The motor drive board contains two L293d h-bridges. One L293d drives the motors on the left side of the bot, and the other L293d drives the motors on the right side of the robot. This allows each gearhead motor to have its own independent driver. The L293d has built-in diodes to shunt the back EMF from the motors, but I still prefer to add .1 micro farad capacitors across the motor leads to reduce motor noise. The board also contains two HEXFET transistors. One HEXFET drives four upward pointing LEDs to light up the area above InspectorBot to allow the upward pointing high definition cameras to take better pictures. The second HEXFET drives two forward pointing LEDs to allow a user to see in front of the robot in dark spaces, such as crawl spaces.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.