 dannyvandenheuvel
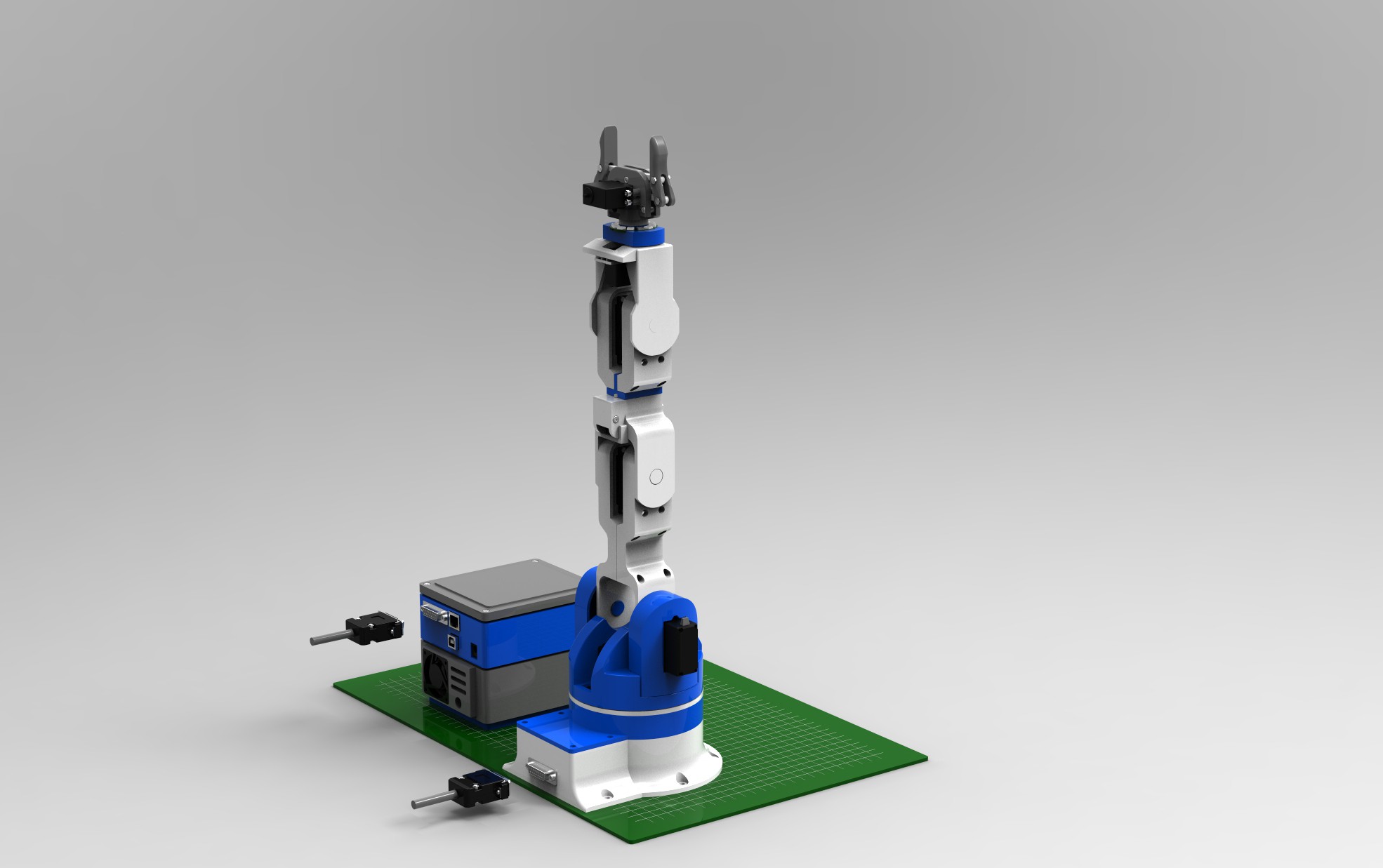
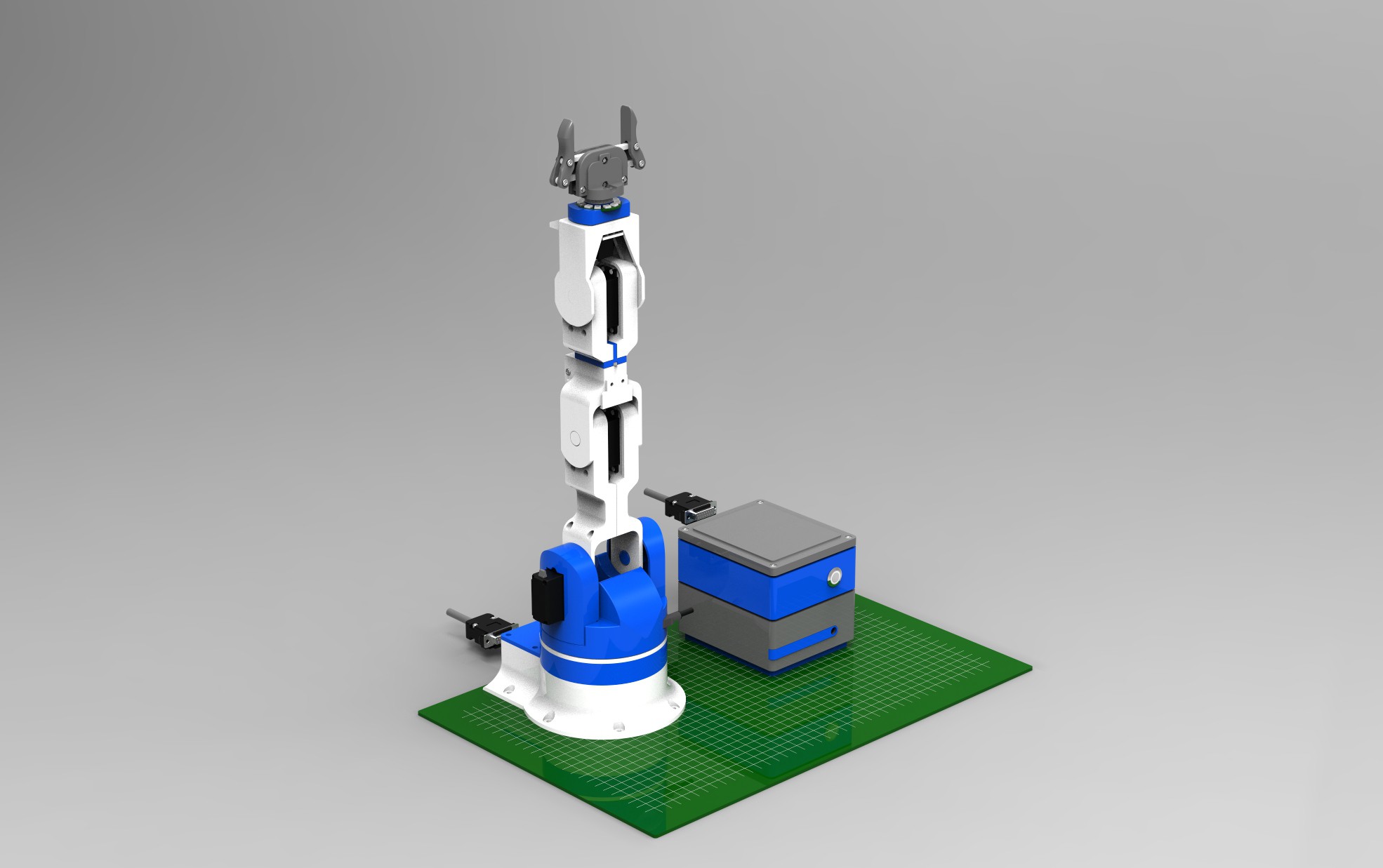
dannyvandenheuvelBecause I wasn't very happy with the movement of the base I decided to combine the new 6DOF robot arm with the base of the thor+ , now I use a bearing inside and a slipring so that wires are not strughling anymore, I use a 'sail winch servo' from hitec that give me the possibility to make 6 turnovers of the motor just like moving a standard servo with 180° of freedom at almost the same time, it gives me a gearing 1:6 and it makes it 1:6 more torck and guess what, I have 1:6 more resolution.
I think this will be a big improvement, I started to draw and I like the result, see for yourself and tell me what you think about it.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
The Thor base is actually a very good base. And the base motor plus ring actually lowers the center of gravity making it more stable.
You may want to add one opening for a small 30x30 mm fan to blow air onto the base cooling the components down and fore an upwards stream. I tested this here and it actually works very good.
In your design these 2 lower motors are put at the outside. I do not know if they heat up a lot. But if they are put on the inside then it might benefit from the air cooling that a base fan blows into the base.
Are you sure? yes | no
Good point! Ventilation will be forsee :-)
Are you sure? yes | no