 Dan DWRobotics
Dan DWRoboticsWell, thought I would share the progress with the hand. Hadn't really predicted quiet how complex a task it is to design a hand from scratch. It is still in its early stages of conception, but the design is starting to look pretty badass, so I thought I would share. What you can't see from the snapshot is that there are a ton of internal tunnels which allow the cabling to be run for transmission of motion from the motors in the forearm. These tunnels and the points at which the cables have to change angle or need to bend needs to be very carefully thought out, otherwise when you move the wrist the fingers would change position for instance. Nothing new there, although there are two cables for each finger, so that instead of a spring action pulling the fingers back to extension the action will be actively driven. Lots of hand designs I've seen use a spring mechanism to open the fingers but I want the fingers to be stable in both directions in case an action requires it.
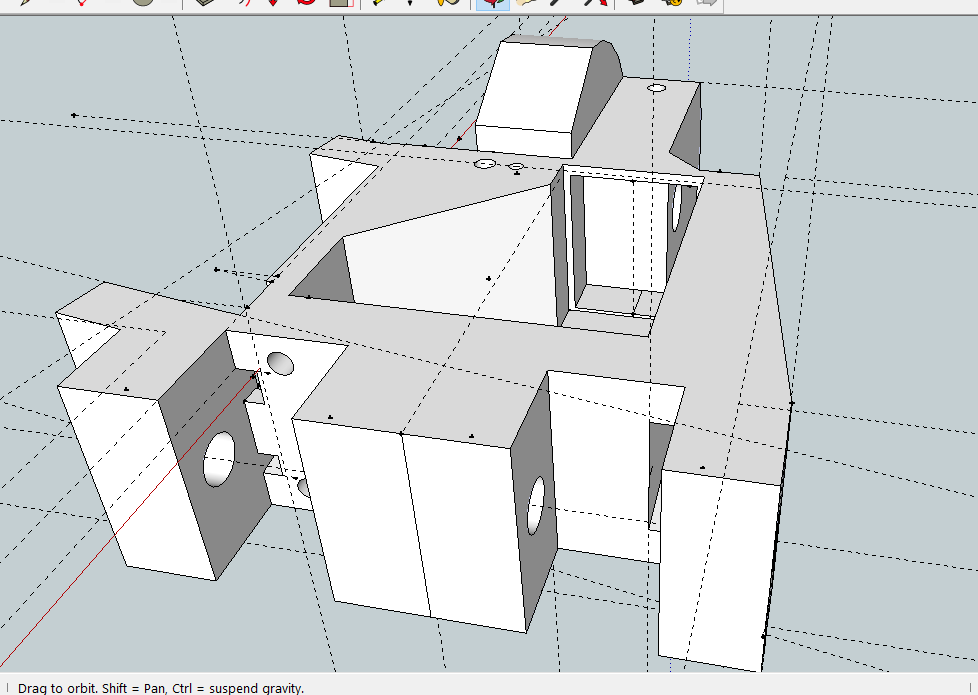
I'm close to printing now, but I know that there will be lots and lots of design revisions until the final version is realised. The angles and mechanisms are all estimated, I actually have no idea if they will work out. But from the first print I can test and make decisions based on what works and what needs changing.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Hi There, Thanks for the interest in the project. As I had predicted, real life will always get in the way of ambitious projects like this. My day job took over my life during a particularly turbulent period and the arm and hand need further design work to make them viable. I have put a lot of emphasis in keeping within humanlike proportions and the forearm is particularly complex to design from scratch. I know I could do it if I had a clear two weeks of free time off work, but there are other factors I should address first. The hips are poorly design and the legs have far too much 'give' at the waist to provide the exact movements that are required in walking. The crushing realisation came to me that I still need to redesign the hips and feet before I start on the hands. I always wanted to be 'realistic' about the probability of it walking, otherwise designing the rest is pointless. It would just be another complex toy if it couldn't walk properly. So, until I can get some quality time and motivation, I won't be able to make meaningful updates. So I didn't lose the 'bug' completely, I decided to revisit one of my staple fascinations and design a small form, but highly powerful desktop robot arm(6 DOF). The comparative ease of this task should keep my skills in check until I can revisit the intense schedule of designing a humanoid. The desktop robot arm is almost finished, although I have not chronicled that as I may want to commercialise it at some point. The brief of this arm is simple; make an arm that is powerful, high in function but extremely low in cost so that it can be enjoyed by kids, hobbyists and enthusiast alike. You may see updates on that soon, but I definitely have not 'shelved' the humanoid as this is my greatest fascination.
Are you sure? yes | no
Haven't seen an update in a while, trial and error iterations on this model must be keeping you busy.
Are you sure? yes | no