 Kirill Salita
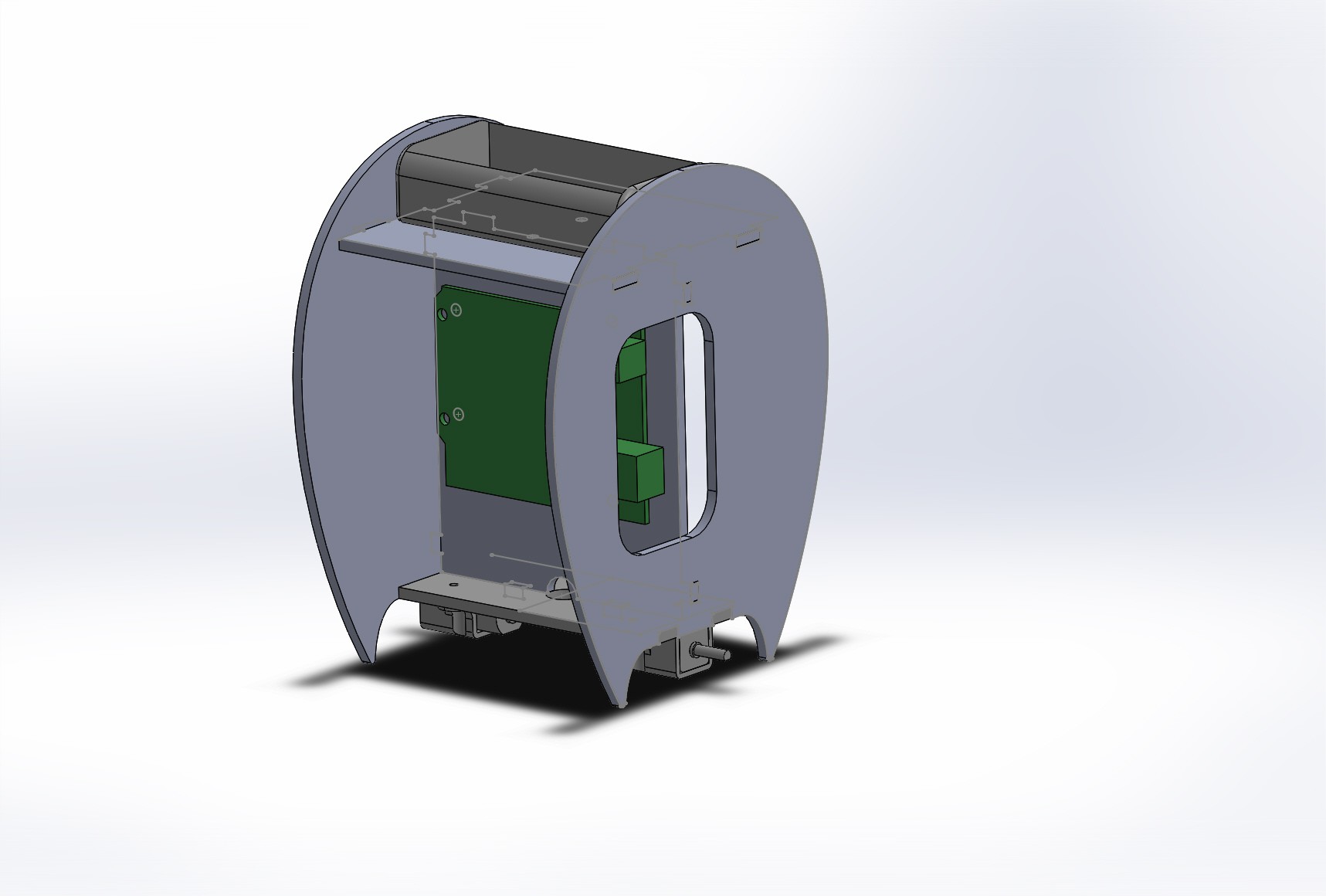
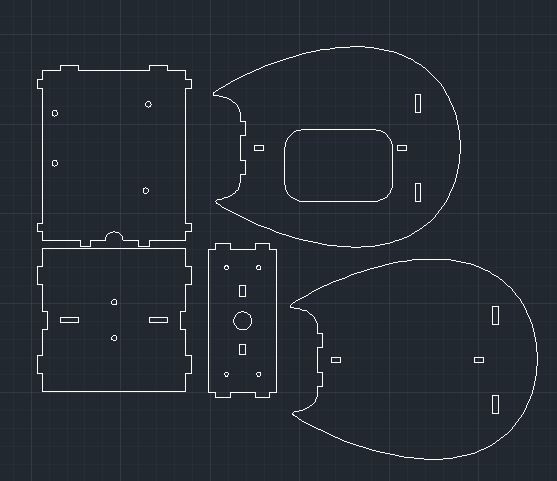
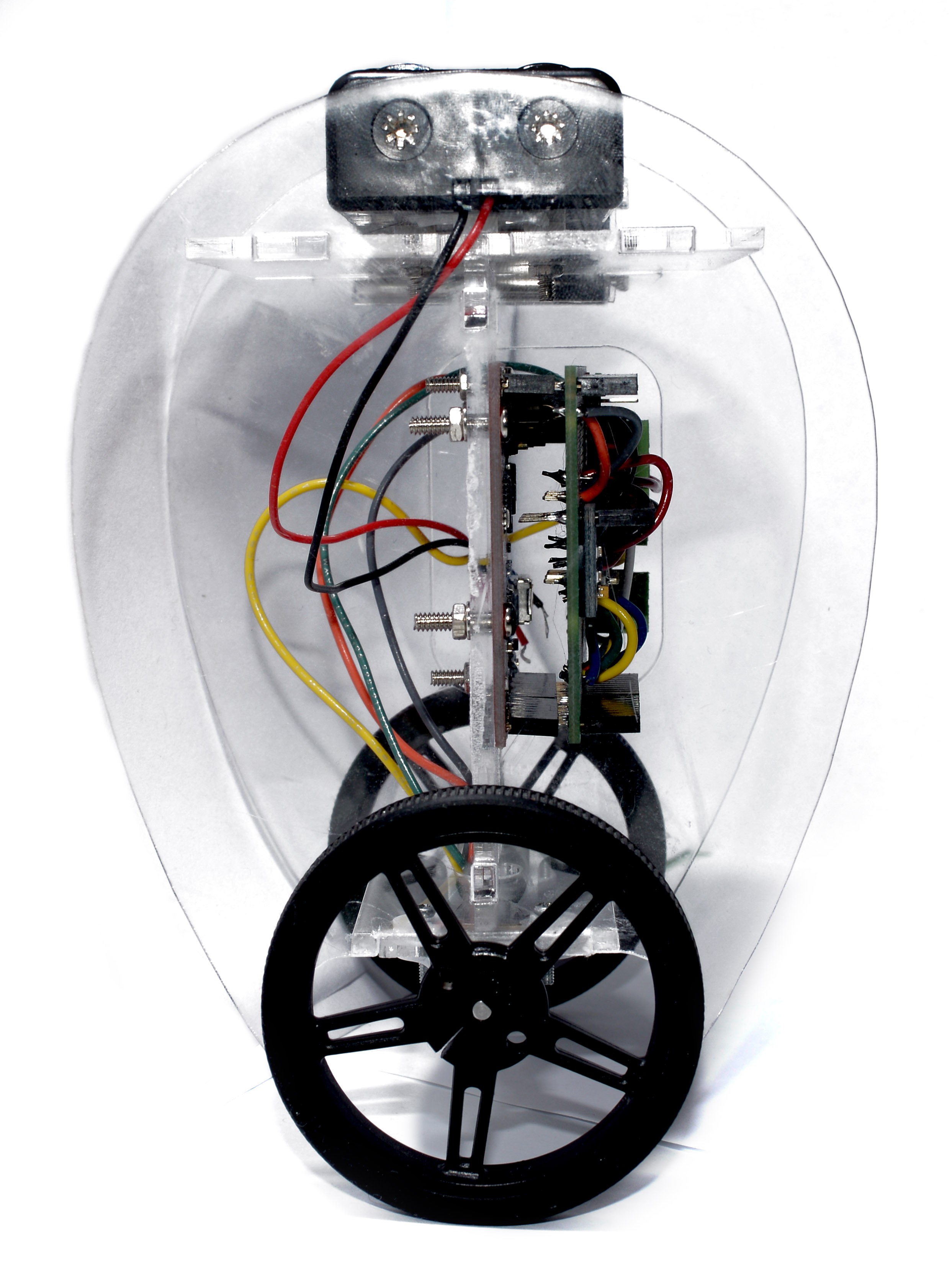
Kirill SalitaIn September 2014 I thought that the reason the LaserBot didn't balance properly is because I designed it to have a reasonably low center of gravity (having the battery compartment at the back of the bot). I discovered that balancing robots need to have a high center of gravity, so that force created at the contact of wheels and ground can create maximum torque about the CG. I had very little time to work on the project at the time, so I still didn't do any calculations or simulation. I just tried to build a new LaserBot chassis with battery compartment on the top. I designed it in Solidworks and again cut it out of 3mm acrylic. Unfortunately it still couldn't balance properly and I still didn't know why.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.