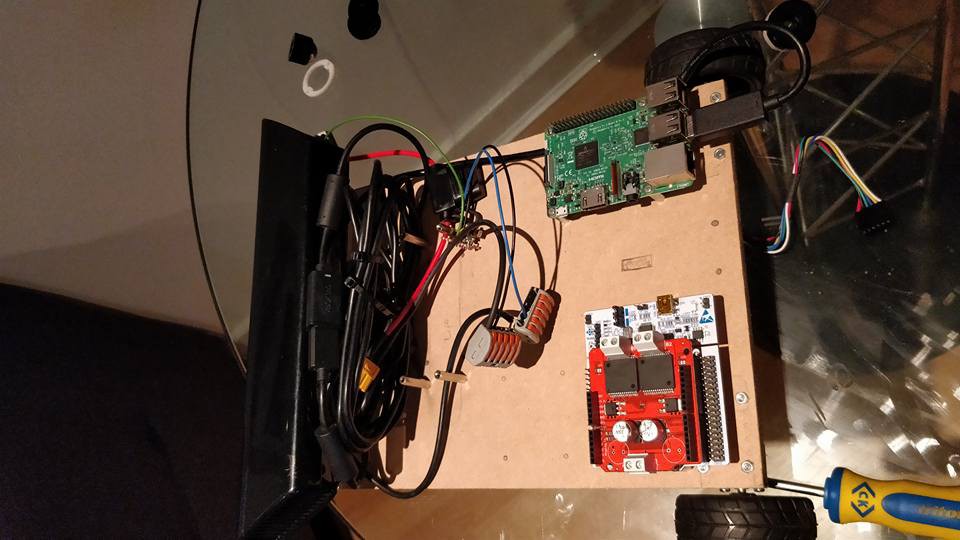
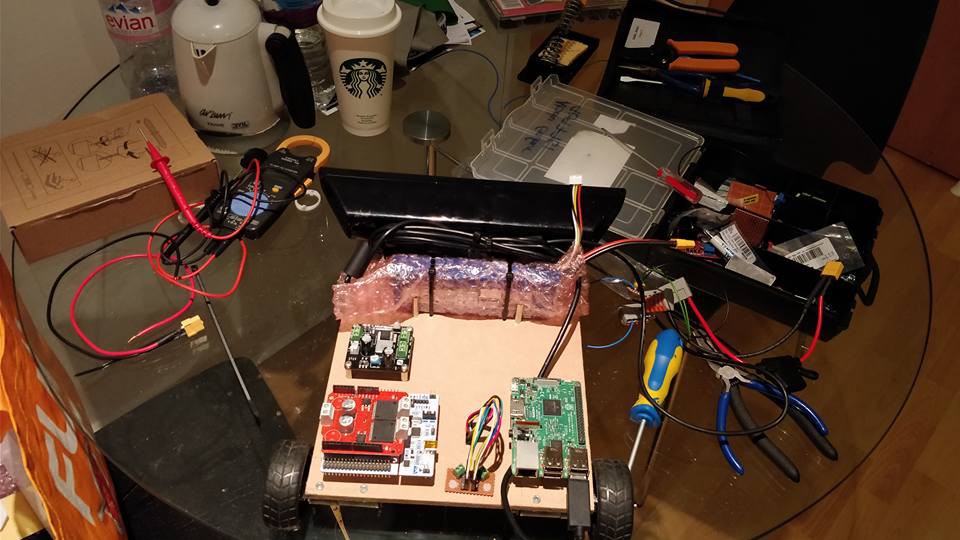
I have ordered all the necessary parts, and have put it all together on a piece of wood to form a prototyping and Learning Rig.





A project log for SLAM Robot using ROS
Simultaneous Localisation and Mapping Robot using a Kinect Sensor and ROS running on a Raspberry Pi.
I have ordered all the necessary parts, and have put it all together on a piece of wood to form a prototyping and Learning Rig.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
your project is very good . It's that I search about project to start my project . How can get all information about it … please help me.
Are you sure? yes | no