 codersilver
codersilverExamples of applications:
- protection of facilities and areas against the access of unauthorized persons
- exploration and inspection of hard to reach places
- tunnels and pipes
- inspection of dangerous places for human life and health
- chemically contaminated places
- buildings threatening to collapse
- transport and neutralization of dangerous objects (explosives, harmful and toxic chemicals)
Example problem and its solution
Formulation of the problem:
Currently a classic monitoring and protection system use of stationary cameras that monitor only the part of the area that should be protected. This disadvantage causes that the system is incomplete and provides only partial control over what is happening in the protected area. Additionally, the camera itself usually does not have the ability to monitor environmental parameters.
Solution to the problem:
The solution to the problem formulated above is a camera placed on a remotely controlled or autonomous vehicle. Such a vehicle can reach every corner of a protected area and give us a real-time preview if everything is okay. It can also send measurement data of physical quantities (e.g. gases, temperatures) to the base station. Furthermore, the transmitted image is processed to detect moving objects with specific features in the selected protected zone. If such objects appear then the system will send an emergency notification to the owner or security office.
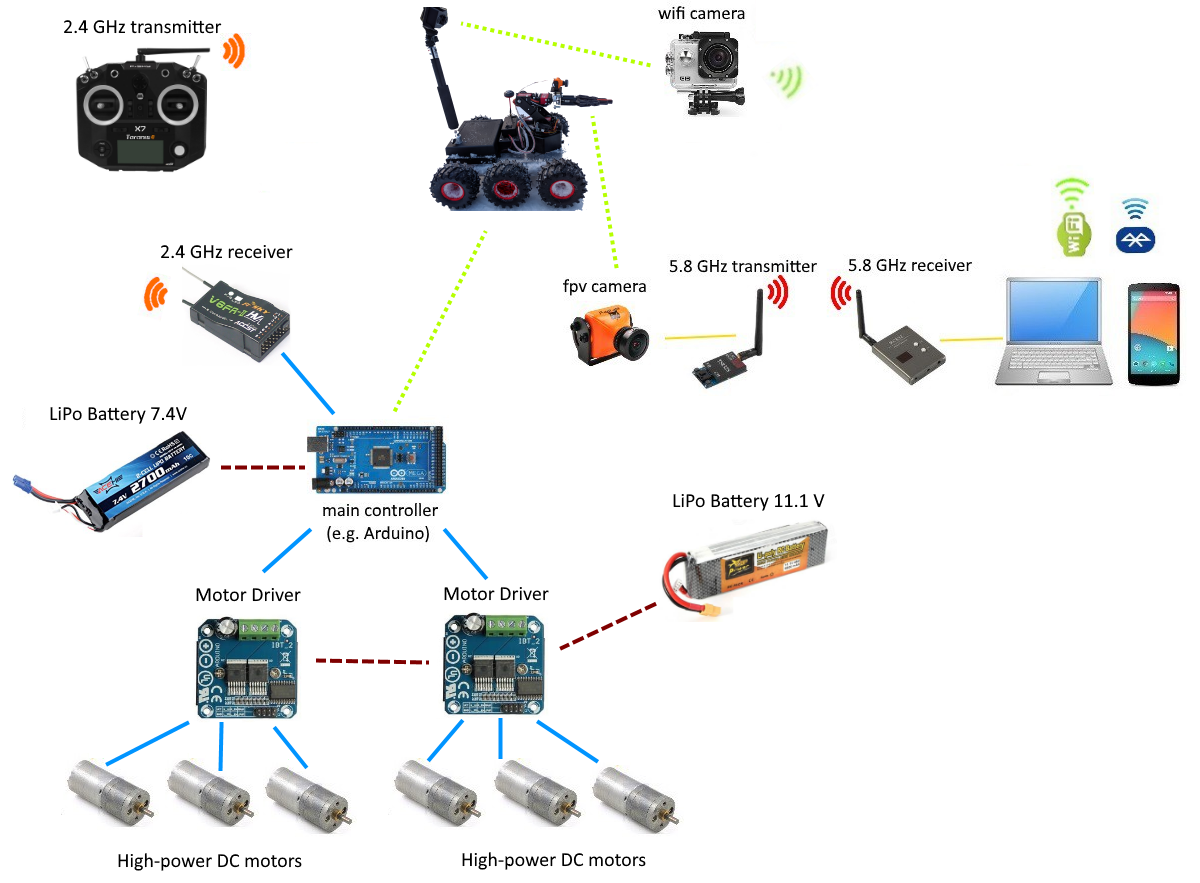
The main controller in this electronic system is Arduino Mega 2560. To be able to control six motors I used two BTS7960B Motor Drivers (H-Bridges). Three motors on each side are connected to one motor driver. Each of the Motor Driver can be loaded by the current up to 43A that gives a sufficient margin of power even for the mobile robot moving over rough terrain. The electronic system is equipped with two power sources. One for supplying the DC motors and servos (LiPo battery 11.1V, 5500 mAh) and the other to supply Arduino, wifi module, fpv camera and sensors (LiPo battery 11.1V, 5500 mAh).




 SerialSensor
SerialSensor
 Danya0x07
Danya0x07
 BTom
BTom
Hi
Nice to meet you after viewing your profile i am Jacinda, from (jakarta) indonesia,
i have a project discussion with you please email me on: (jacinda.seiler@yahoo.com)