Things You Need
Hardware Components:
- DFRduino UNO R3
- DFRobot I/O Expansion Shield
- DF05BB Tilt/Pan Kit(5Kg)
- DFRobot Photocell x 4
- Resistor 10kOhm x 4
- DFRobot Solar Panel
Software:
- Arduino IDE
Tools:
- Solder Iron
In modern solar tracking systems, the solar panels are fixed on a structure that moves according to the position of the sun.
Let us design a solar tracker using two servo motors, a light sensor consisting of four mini photocells and Arduino UNO board.
Assembly of the Pan Tilt
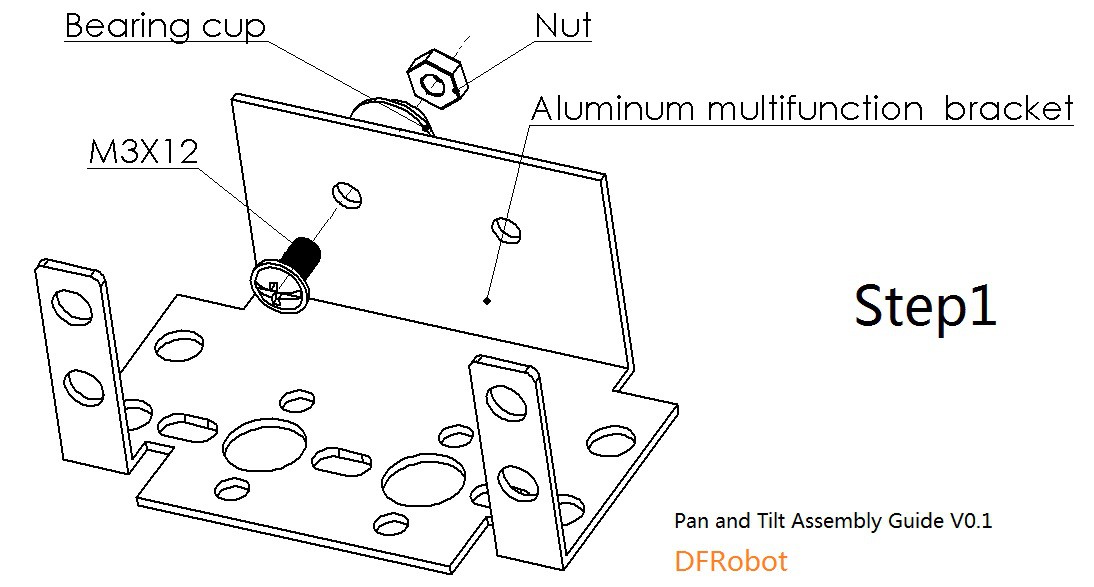

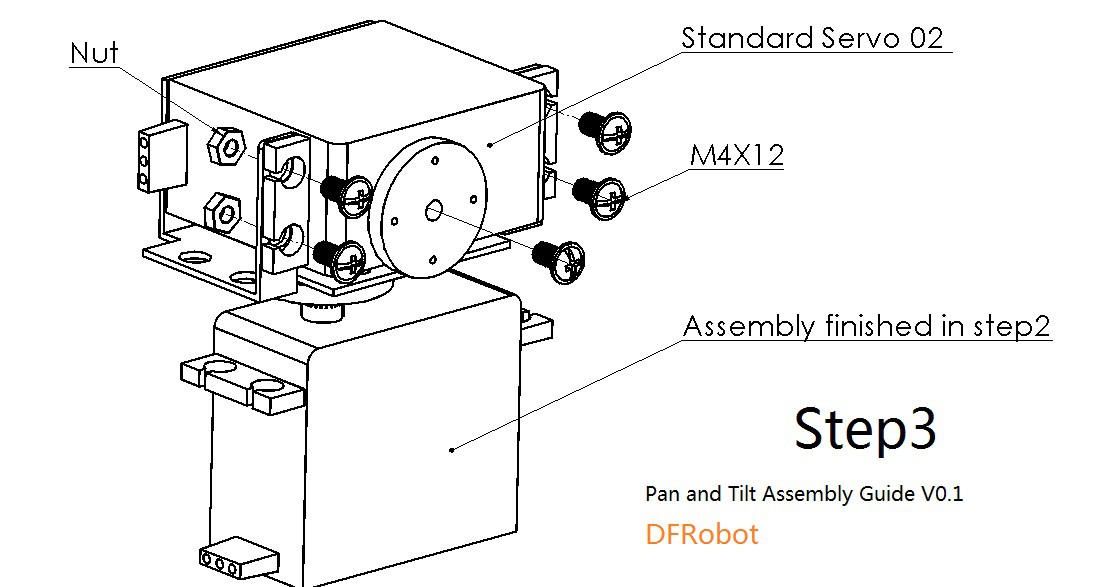
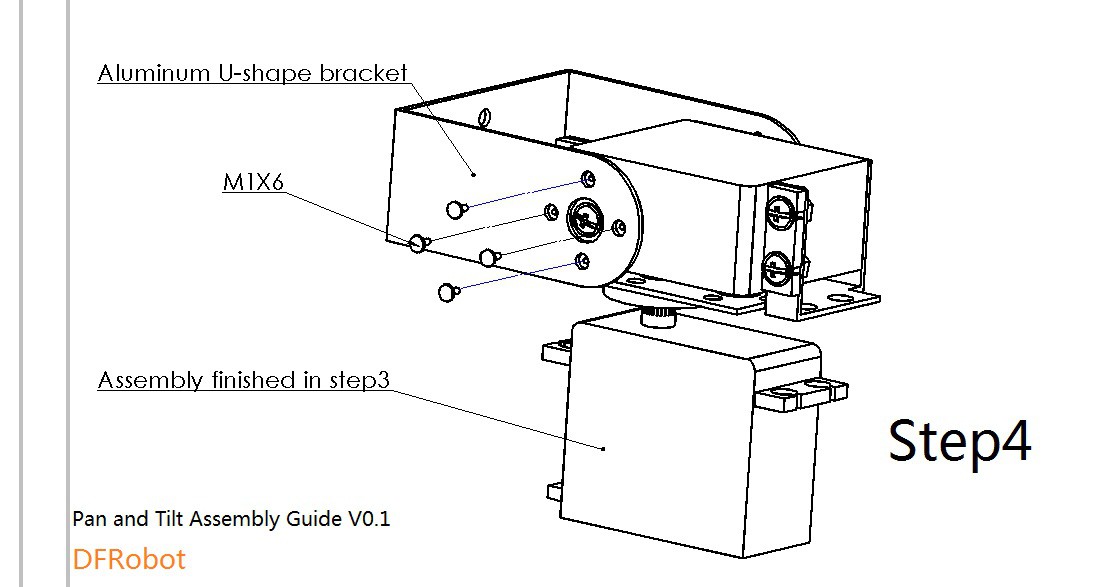
Follow the steps in the images above and assemble the parts.
Remember: Use rubber spacers when using the M1x6.
Connections
Stack the I/O Expansion Shield on the Arduino.
- Connect lower servo with D9 in shield.
- Connect upper servo with D10 in shield.
- Take +5V and GND to power rails in breadboard.
- Connect +5V in breadboard to each photocell.
- Connect upper left photocell to A0.
- Connect upper right photocell to A1.
- Connect lower right photocell to A2.
- Connect lower left photocell to A3.
- Connect GND terminal of each photocell to GND with 10k Ohm resistor in series.
Fixing and Testing
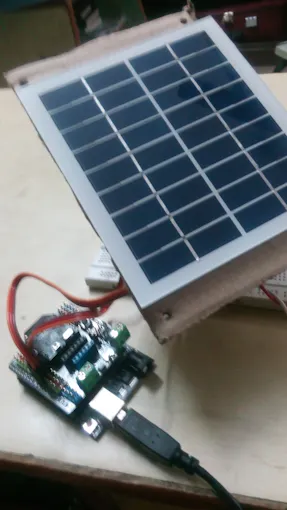
- Fix the Solar Panel on a cardboard and paste it on the face of upper servo.
- Take out all the wires and give them a play so as to move about 180 degrees.
- Put the system on a stable platform.
- Upload the code and test it with a bright LED or a bulb.
Schematics
Image source : Electronics Hub![]()
CODE
#include<Servo.h>
Servo servohori;
int servoh = 0;
int servohlimithigh = 180;
int servohlimitlow = 0;
Servo servoverti;
int servov = 0;
int servovlimithigh = 180;
int servovlimitlow = 0;
//Assigning LDRs variables
int ldrtopl = 0;
int ldrtopr = 1;
int ldrbotr = 2;
int ldrbotl = 3;
void setup() {
servohori.attach(10);
servohori.write(0);
servoverti.attach(9);
servoverti.write(0);
}
void loop() {
/* code */
servoh = servohori.read();
servov = servoverti.read();
//capturing analog values of each LDR
int topl = analogRead(ldrtopl);
int topr = analogRead(ldrtopr);
int botl = analogRead(ldrbotl);
int botr = analogRead(ldrbotr);
// calculating average
int avgtop = (topl + topr) / 2; //average of top LDRs
int avgbot = (botl + botr) / 2; //average of bottom LDRs
int avgleft = (topl + botl) / 2; //average of left LDRs
int avgright = (topr + botr) / 2; //average of right LDRs
if (avgtop < avgbot)
{
servoverti.write(servov +1);
if (servov > servovLimitHigh)
{
servov = servovLimitHigh;
}
delay(10);
}
else if (avgbot < avgtop)
{
servoverti.write(servov -1);
if (servov < servovLimitLow)
{
servov = servovLimitLow;
}
delay(10);
}
else
{
servoverti.write(servov);
}
if (avgleft > avgright)
{
servohori.write(servoh +1);
if (servoh > servohLimitHigh)
{
servoh = servohLimitHigh;
}
delay(10);
}
else if (avgright > avgleft)
{
servohori.write(servoh -1);
if (servoh < servohLimitLow)
{
servoh = servohLimitLow;
}
delay(10);
}
else
{
servohori.write(servoh);
}
delay(50)
}


 Saul
Saul
 Hari Wiguna
Hari Wiguna

 spark buzzer
spark buzzer
Have you referenced any case studies on trackers vs. stationary systems such as with https://www.allearthrenewables.com/blog/dealers/pv-tracker-vs-pv-fixed-mount-system ? I wonder if there are comparable metrics you could try to construct for your design relative to a stationary unit (?).