 Andreas Hoelldorfer
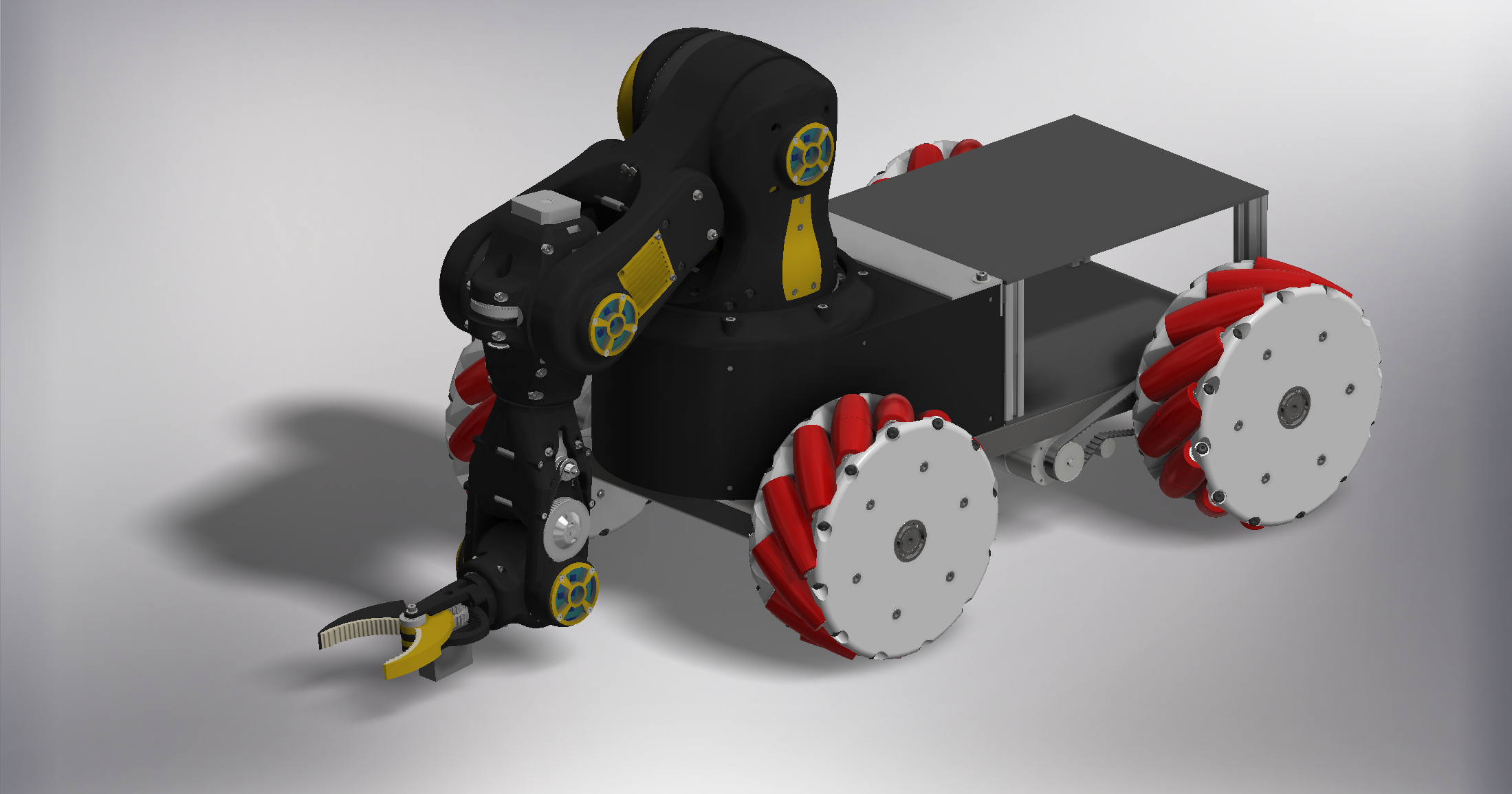
Andreas HoelldorferThat's where I'm currently heading ( My 2019 ) :
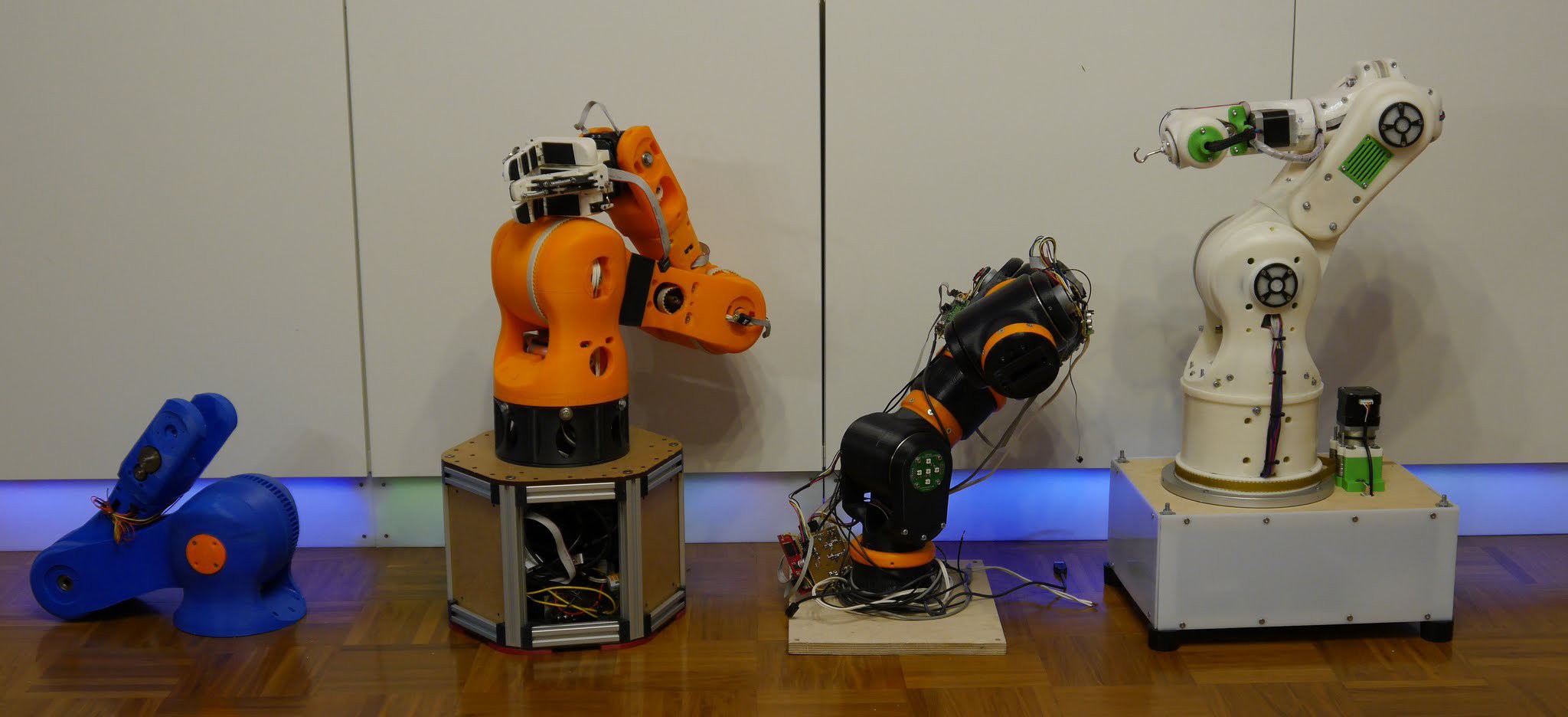
The four robots I build since this project started.
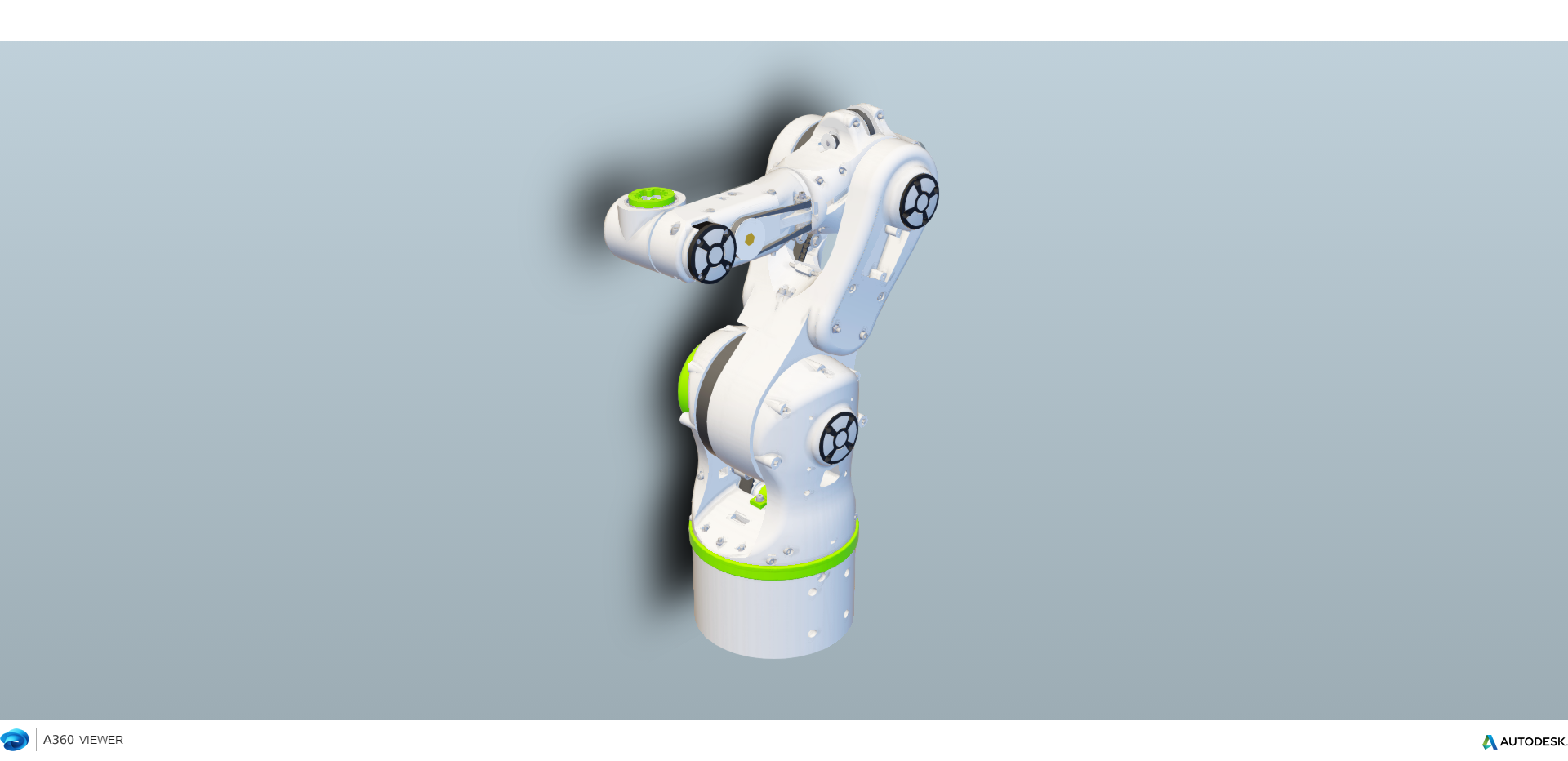
 Version 4 now nearly done and in testing.
Version 4 now nearly done and in testing.
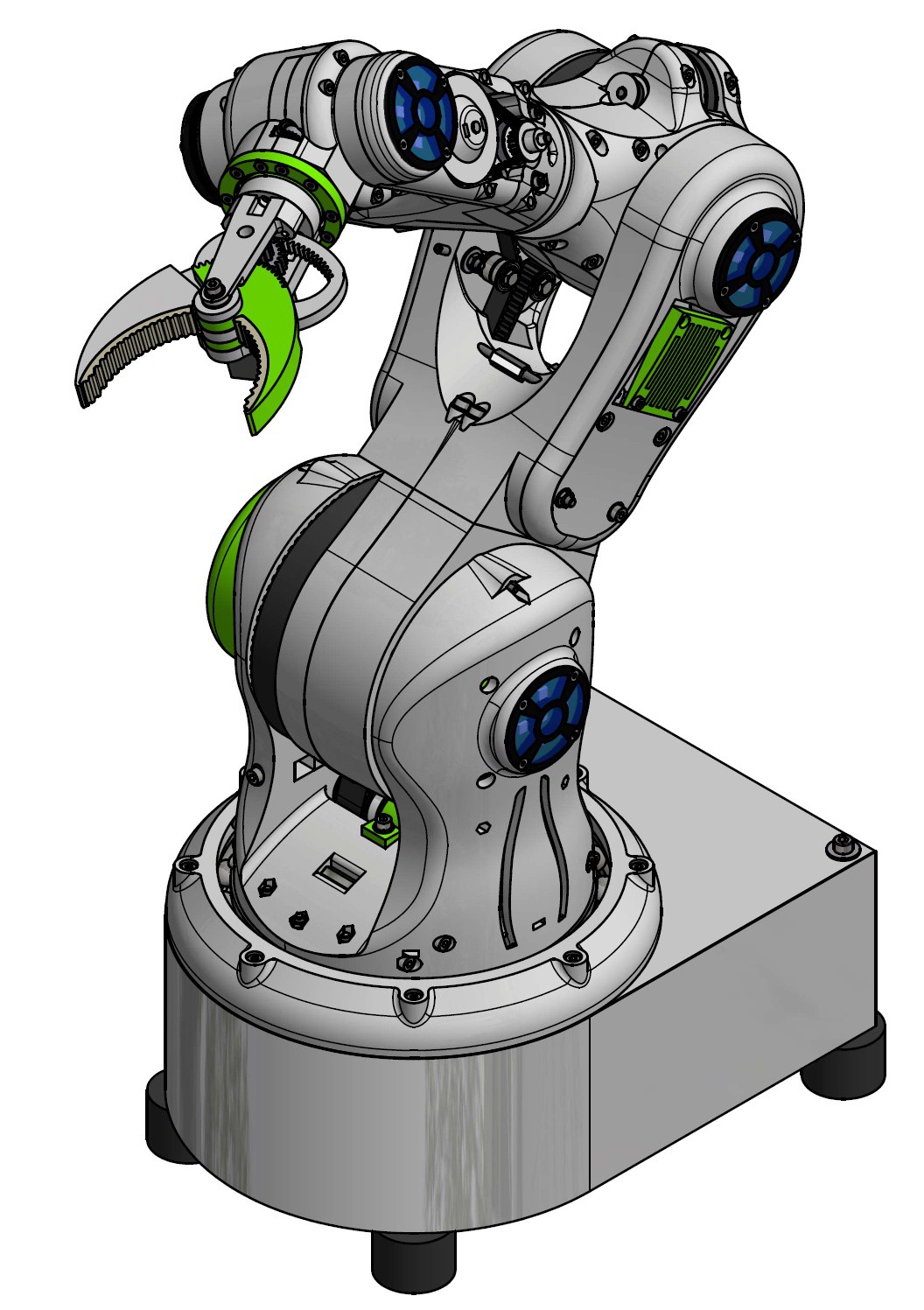
Take a look at the Gripper I designed for my Robots:
Version 4 is now nearly complete:
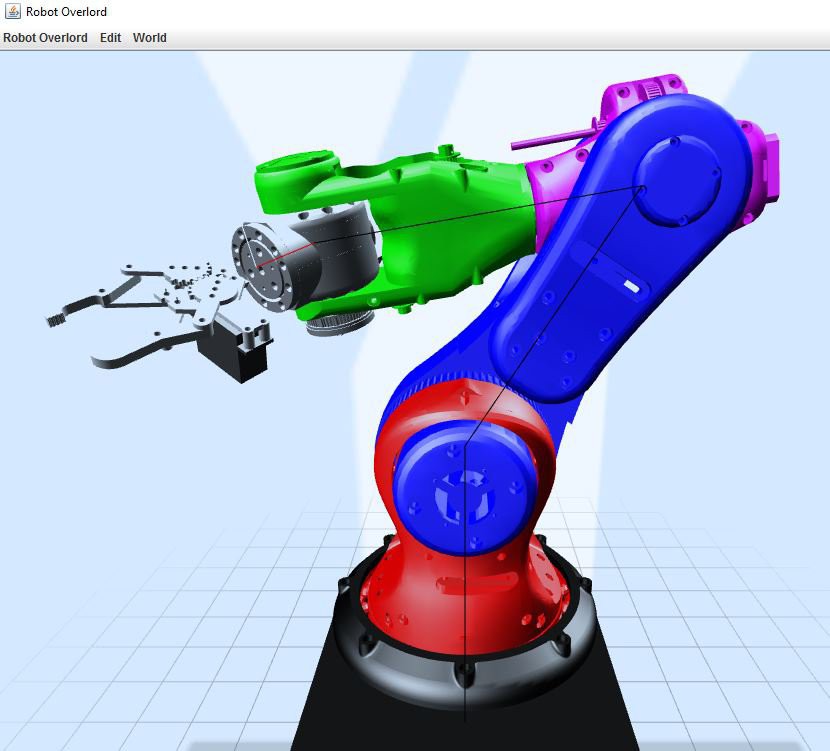
I also started uploading the files on github:
https://github.com/4ndreas/BetaBots-Robot-Arm-Project
And a components list for version 4:





















 Pavel Surynek
Pavel Surynek
 Dan Royer
Dan Royer
 BTom
BTom
 AdityaPrakash23
AdityaPrakash23
Hi, can you update link for components? Right now it is not working.