0%
0%
One-Tiny Bot
Mobile robot controlled by one ATtiny85
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
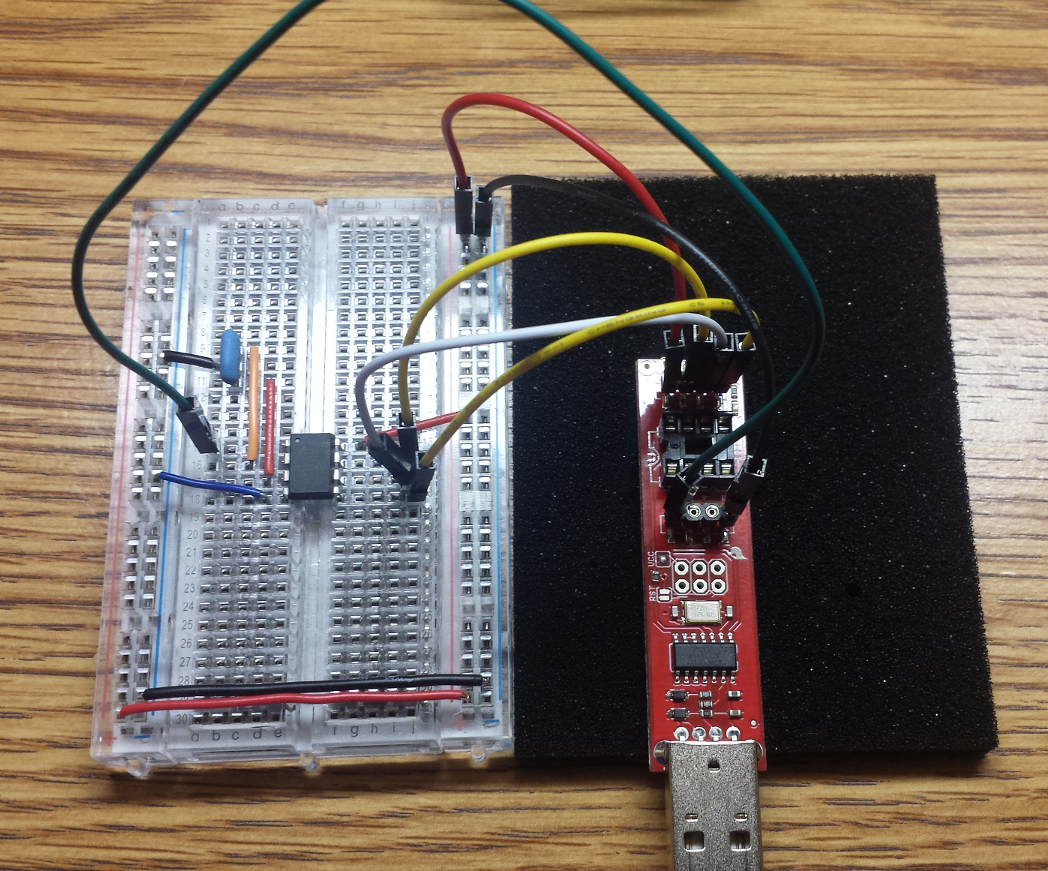 I could then plug the programmer into my computer, open Arduino, and use the "Burn Bootloader" command from the Tools menu (after first selecting "8 MHz (Internal)" from the Tools > Clock menu) to reconfigure the Tiny to use its internal clock.
I could then plug the programmer into my computer, open Arduino, and use the "Burn Bootloader" command from the Tools menu (after first selecting "8 MHz (Internal)" from the Tools > Clock menu) to reconfigure the Tiny to use its internal clock. 
 Marcin Saj
Marcin Saj
 Lee Sampson
Lee Sampson
 Leon Bataille
Leon Bataille
 danjovic
danjovic