 deʃhipu
deʃhipuSome time ago I got the Sharp distance sensor to work with Tote (somewhat), and I promised we will do something interesting with it. Obstacle avoidance is old, so let's try to make the robot follow us instead. The idea is actually very similar to obstacle avoidance, except that instead of avoiding obstacles, you go toward them.
So what's the plan? We want our robot to behave differently depending on what the distance sensor is telling it:
- If the obstacle is very close, go backwards;
- if the obstacle is close, stay in place and do nothing;
- if the obstacle is far, go forward;
- finally, if there is no obstacle in sight, rotate in place to find it.
This translates pretty easily into code:
void sharp_loop() {
int distance = analogRead(A4);
if (distance > 660) {
creep_dx = 0;
creep_dy = -1;
creep_rotation = 0;
beep(352, 100);
} else if (distance > 480) {
creep_dx = 0;
creep_dy = 0;
creep_rotation = 0;
} else if (distance > 420) {
creep_dx = 0;
creep_dy = 1;
creep_rotation = 0;
beep(704, 100);
} else {
creep_dx = 0;
creep_dy = 0;
creep_rotation = PI/45;
beep(1408, 100);
}
}I also added some beeps in there, that will tell us what the current state is. Since the new PCB has a place for a piezo buzzer on pin 13, I also added it to the previous robots:
But how does our code work? Turns out, that it doesn't work very well. The problem comes from how our 5V sensor works when it's under-powered with 3.3V. Remember the plot of values from last time?
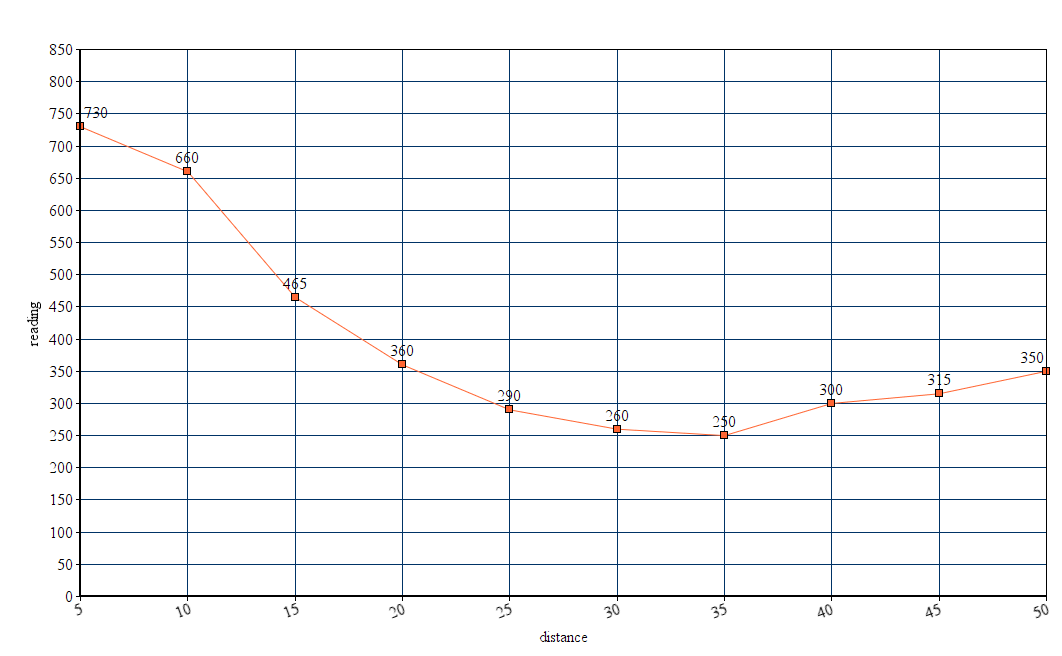
It's U-shaped, and that means that we get the same reading both for 20cm and for 50cm and more. That means that we have practically no way to tell if something is 20cm away or 50cm away, and that means that we can't reliably get the "no obstacle in sight" condition.
Even if we shorten our distances to where the curve is relatively straight, we are still going to get weird readings when nothing is that close.
Oh well, the sensor was cheap so it was worth a try. I guess this is a lesson: don't try to use parts outside of their specified parameters. Now I ordered some distance sensors that work between 2.7 and 5.5V, so that should be better. I will try again when they arrive.
Finally, a video of Tote failing to follow my hand:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.