 deʃhipu
deʃhipuA small robot walking around your desk or even around your room on the floor is one thing. The same robot climbing your furniture and able to get everywhere in your room is a completely different game! That's why I always wanted to make Tote able to climb. Unfortunately, the problem is harder than it seems at first sight.
One way of doing it is by using magnets on the feet. It limits you to metal surfaces, but that's a start. Today the magnets I ordered for that purpose finally arrived, so I was able to do some experiments. Unfortunately, the results are not very encouraging.
First, I attached the magnets to the robot. I figured that I want to maximize the traction, while minimizing the force needed to actually un-stick the leg, so I went for small flat magnets, and I wrapped them into rubber from a balloon, then tied that to each leg.
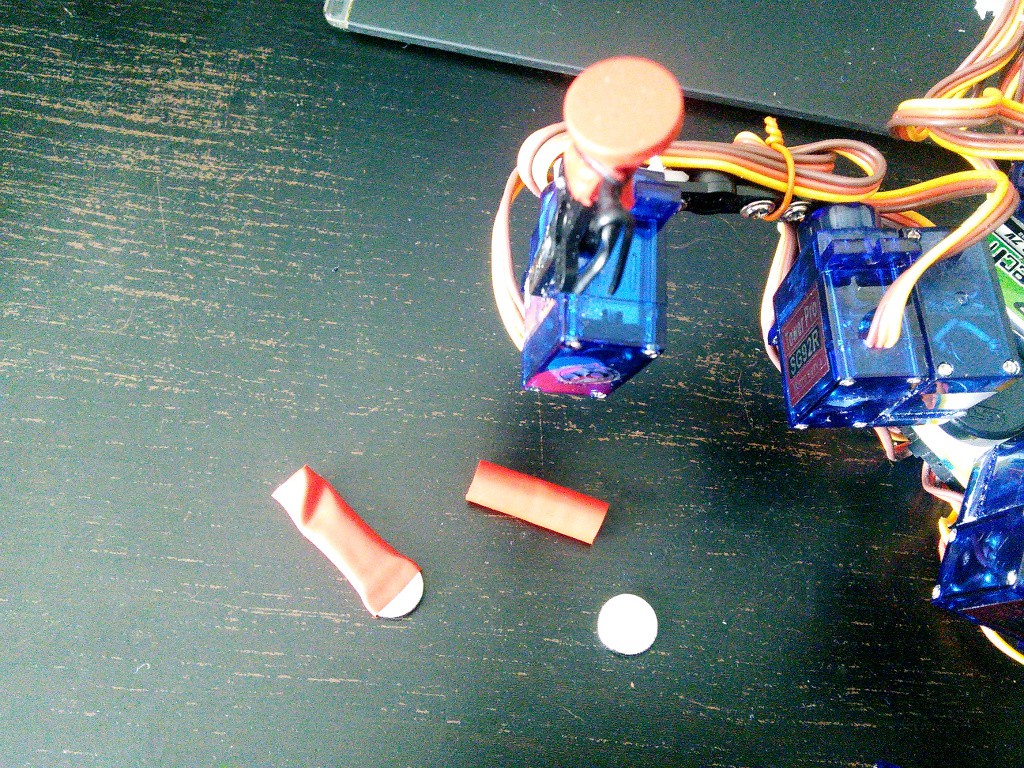
Since the magnets seemed to be small and weak, I used two of them on every foot initially. The effect wasn't very good -- they turned out to be too strong, and Tote couldn't lift any of its feet:
Fine, let's try with fewer magnets then. That turned out to be just strong enough to hold the robot when all four feet are touching the metal surface, but not strong enough when on of the feet is raised:
Oh well, nobody said it will be easy. Back to the drawing board now. Maybe I will try to climb a net next time?
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Assuming the robot has to hang on n-1 feet and has weight w, Tote needs to have a servo force w/3. A 6 legged robot only needs w/5. Therefore Henk can have 167% the weight of Tote with similar climbing ability. You're probably right, the extra structure will be more than 17% of Tote's weight.
Two other ideas:
1. lift all the other feet at once and rely on the servos having a higher braking strength than lifting strength (this is usually true).
2. moving a magnet onto an edge and then lifting is usually easier, maybe give the lifting foot some lateral motion to try to drag the magnet onto an edge?
Are you sure? yes | no
certainly worth a try! Actually, it's not totally discouraging... Might take some fine-tuning, though. E.G. two magnets, and a spacer of some sort...?
Are you sure? yes | no
I think what I need is actually a larger surface of the foot, for better traction, and a lighter robot. I think I will try with µKubik, should work better.
Are you sure? yes | no
Maybe more feet?
Are you sure? yes | no
Perhaps, but #Henk hexapod robot is till not ready, and it's much heavier and larger, so probably wouldn't work anyways.
Are you sure? yes | no