 deʃhipu
deʃhipuI almost had the Raspberry Pi thing working last time, and I promised to get it to work, but not just yet. The last two weeks I had a different project on my mind. I was participating in the Micro World Tour, a program that gets a couple of the micro:bit boards into the hands of Python hackers to do something nice with its Micropython implementation. So, obviously, I had to put it on Tote. Just imagine every kid in UK building their own quadruped robot and doing amazing stuff with it!
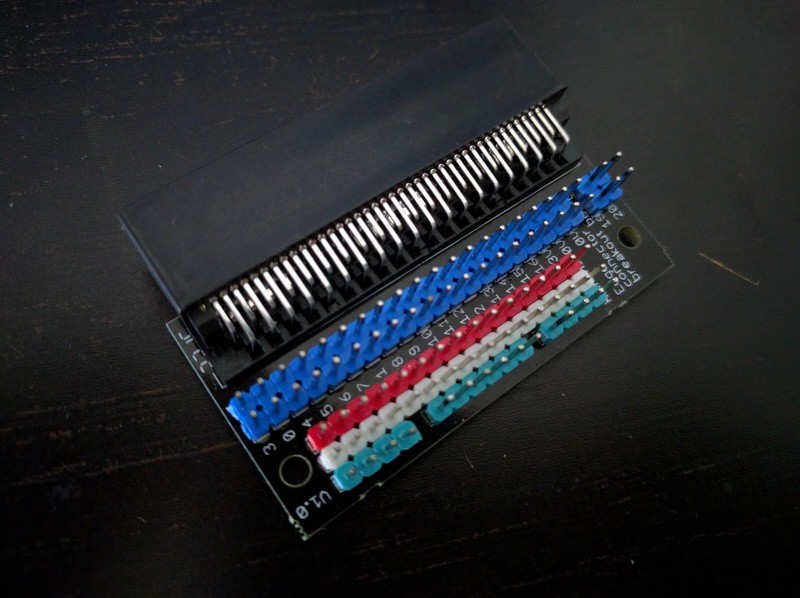
But yeah, there were some hurdles. First, we had to write some documentation for it, because it's all just being created as we go. Then I had to use an edge connector, which I received separately, to get access to the I²C pins:
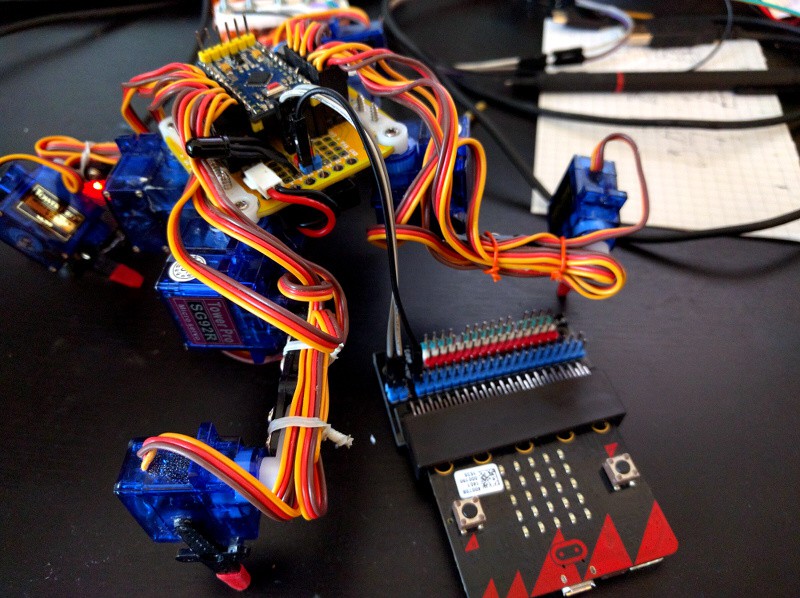
I already had the i2cslave code that I've written for Raspberry Pi last time, so that part was easier. So all I needed was to hook it up and test:
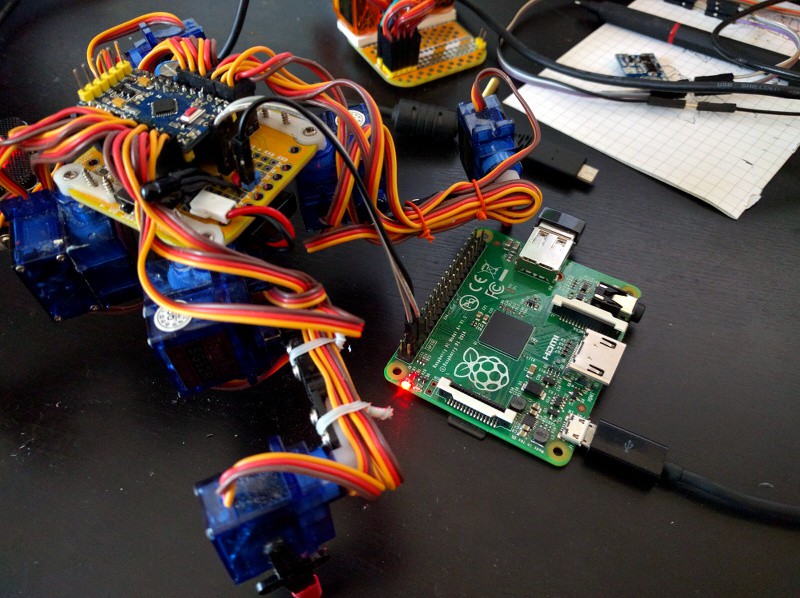
Unfortunately, it didn't work. The i2c.write() function simply seemed to do nothing at all. I reported the issue, and the good Micropython developers added error handling to it, so now at least I could see an exception being raised. But it turned out to be a generic I²C error, not really telling me what is wrong. I spent the whole weekend trying different variations, adding pullup resistors, checking if the accelerometer and compass that are on the same I²C bus work (they did), etc. I also tested it multiple times with Raspberry Pi, to make sure the error is on the micro:bit side:
Finally, my week with micro:bit ended, and I had to send it to the next person. So I packed the whole thing up and went to bed.
I couldn't sleep that night. Instead, I read the I²C specification and the Atmel notes on using TWI on their AVR chips. The next day, I read some helpful suggestions in the comments on the issue that I reported, and noticed a curious thing. One of the comments in the C code for the micro:bit DAL mentioned, that the I²C address is 8 bit. That's strange, because from the spec I knew that I²C uses 7 bit addresses, and the least significant bit is used to indicate the direction of communication. Hmm, wait a minute, if I tried and shifted the address one bit to the left...
I unpacked the board, hooked it up to my robot again and tried. And sure enough, it just worked. Amazing. Don't worry, this will be fixed in the future, so that the final versions will all use 7 bit addresses. But once I had it working, I couldn't just pack it back and send it. I wrote a quick e-mail to the next person apologizing for it, and went to work. In the evening, I sat down and started to port the inverse kinematics to Micropython.
I wrote the IK code for my robots many times already, but each time it's an equally frustrating process of figuring out why the leg is moving in the direction opposite to expected. It took me several hours, but I finally did it.
Then some more frustration while I tried to make the walking code work. Here the challenge was not so much the code itself, because once you know what the robot has to do, it's quite simple, but the fact that I ran out of memory and stack space. I had to do a few unpythonic things to my code to make it fit on this small board, but finally I got a (very bad) gait working. So I strapped the micro:bit on top of Tote, and let it walk:
I know there is a lot that could be improved here. In fact, this is quite horrible, compared to how Tote walks normally. This is not the fault of micro:bit, but rather my sloppy programming and the fact that I was in hurry.
Once this was done, I packed the micro:bit up again and this time really sent it to the next person in line.
After this, Raspberry Pi should be a piece of cake :-)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.