 J. M. Hopkins
J. M. Hopkins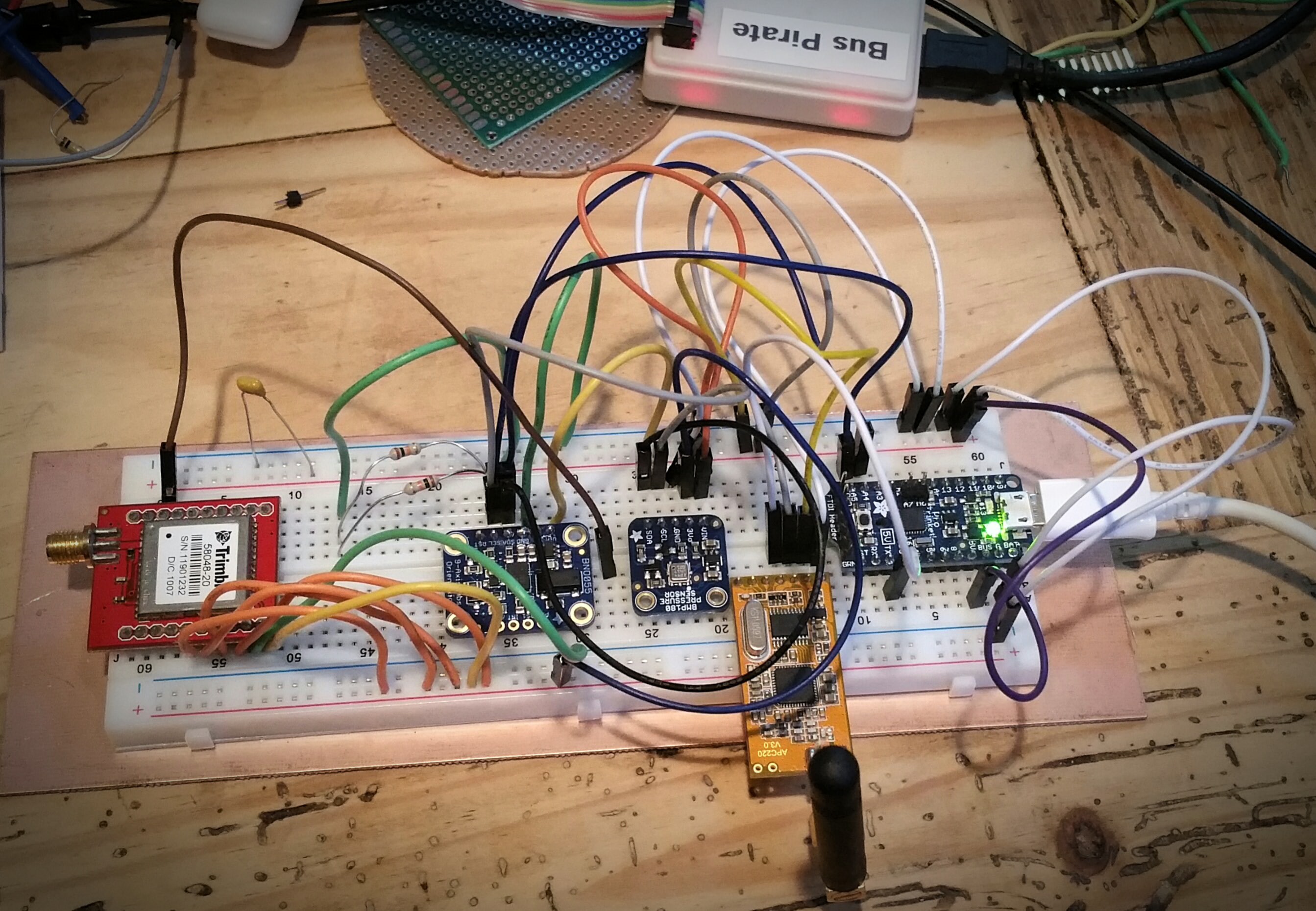
I've done a fair amount of work on the electronics side of the project. I've integrated the sensors, microcontroller, transceiver, and completed the remote ignition circuitry.
Onboard there is GPS, a full IMU (providing accelerometer, gyroscope, and magnetometer, heading and temperature data), and barometric sensor (with an additional temperature sensor).
The 70cm transceiver is running at 20mW, which seems really low, but with the yagi and LNA I can close the link at quite a respectable distance. More testing on that later. The datarate is 4800 to allow better Eb/No at the low power levels. An optional 1 watt power amplifier can be added if needed, but I'd rather avoid the battery penalty involved with that.
The igniters I have are electronic matches, and ignite off with 400mA of current, so a smaller battery or even small 5V 1F super capacitor will work as the current source. They use a signal from the microcontroller and an NPN transistor to send current from the ignition battery (or capacitor) to the igniter. Appropriate safety toggle switches will exist for RSO peace of mind. I'm thinking on the remote ignition side that launch commands can be given along with a safety "Launch Code".
Data is sent back in a data stream similar to NMEA, but adds additional details from the other sensors at a rate of about 5Hz. This data will allow the base station to track the rocket live in Google Earth and custom telemetry screens. A terminal console will enable remote commands.
Once circuitry connections are finalized I'll solder up the PCB and get ready for rocket integration.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.