 Sidharth
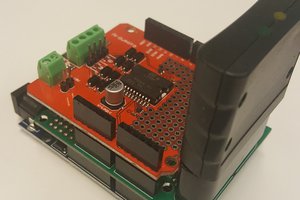
SidharthFour coreless motors along with their propellers keep the quadcopter hovering above ground. The frame for the quadcopter is a perfboard and Lego pieces used for the arms and motor mounts. The hardware consists of an Arduino Pro Mini, MPU6050 and NRF24L01+ modules on the flight controller board. The motors are controlled by the Arduino PWM signals via four Si2302 mosfets. The propellers used are standard Hubsan propellers. The flight controller also has circuit for low battery voltage detection. The flight controller board is powered by a 3.7V 500 mah 50C LiPo. (A bit under spec :D )
On the transmitter side I've used another Arduino Pro Mini, an NRF24L01+ module and a few voltage regulators. Two joysticks are used to input throttle and ypr values.
For now I'm having a bit of a problem with one of the mosfets as it isn't turning off completely. This problem will be rectified in a further update.











 igorfonseca83
igorfonseca83
could u just provide me with the code