 Neil K. Sheridan
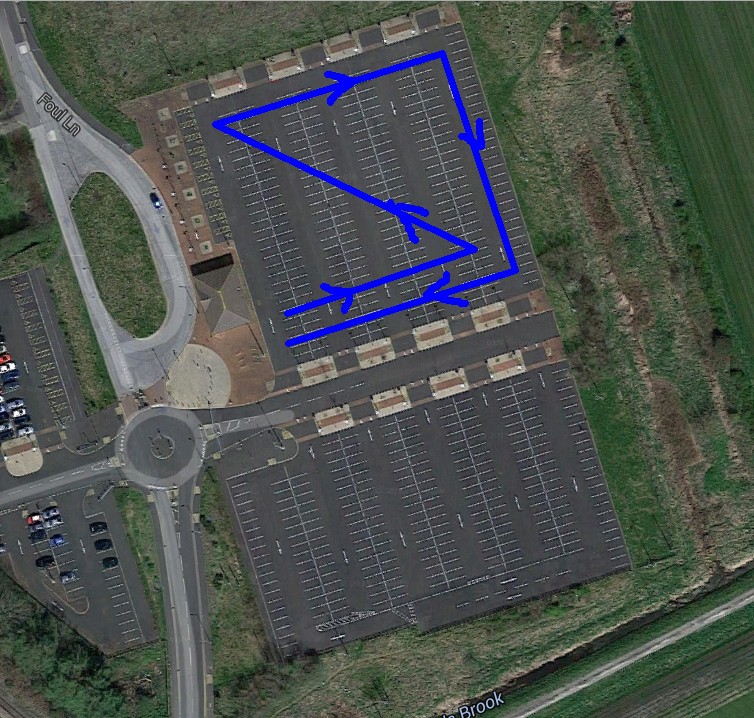
Neil K. SheridanThe first prototype of the robot pollution-detection boat is land-based and will test the autonomous navigation software and GPS by following pre-set paths around a car park. Subsequently, the last-resort ultrasonic sensor based collision detection will be tested by introducing obstacles
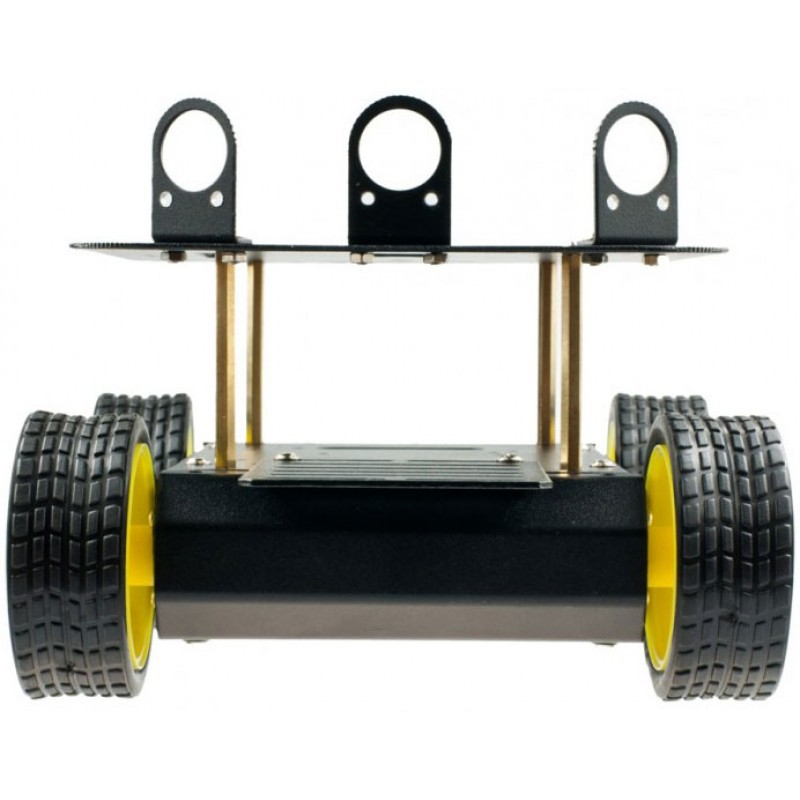
The electronics are being mounted on a 4WD chassis (DFRobot 4WD Arduino Mobile Platform)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.