 mikrotron
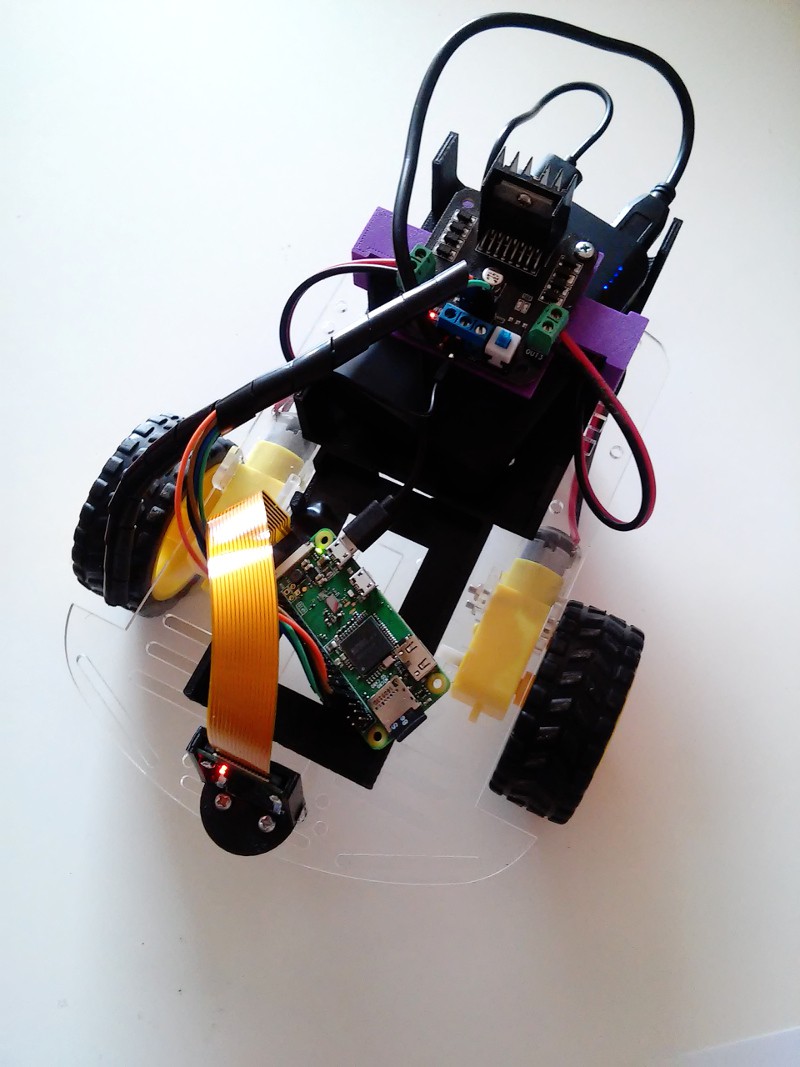
mikrotronIt's been some time since the last revision of Autotron Pi project, and many things have changed since - for one, there's much smaller and cheaper version of RPi that can be used for Autotron Pi: Zero W. Which is not only smaller, but also it's less thirsty, which means our juice canister can shrink too. And the price goes down again, not affecting the usability at all!
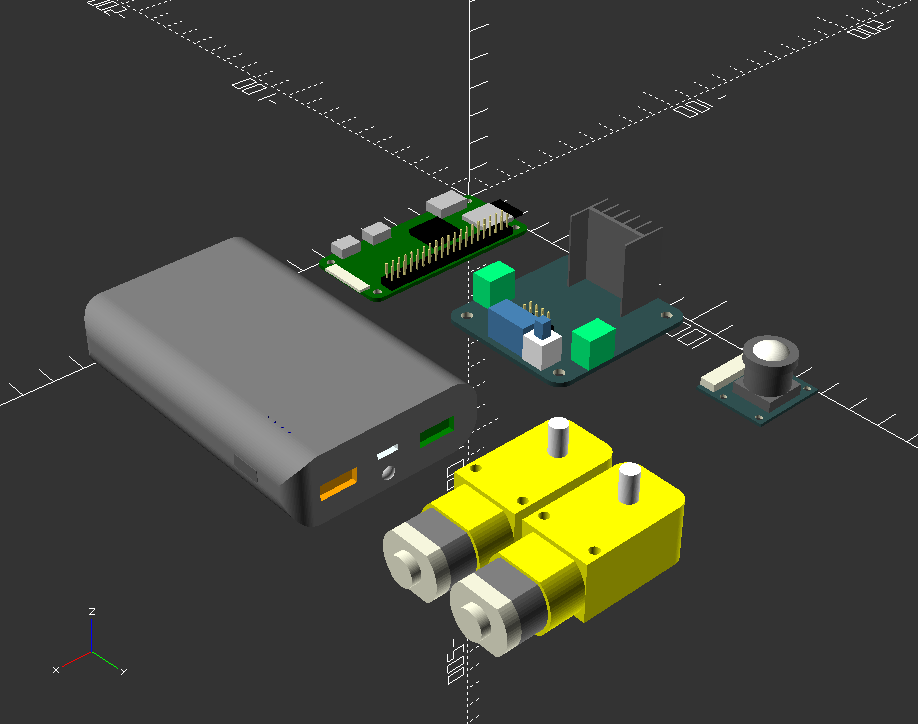
So, what else is there to do other than to restart the project? Of course, smaller component sizes means we can 3D print the chassis, right? Right! And that will allow us to ditch most of the 3D printed mounting pieces as those can be integrated into the chassis design now.
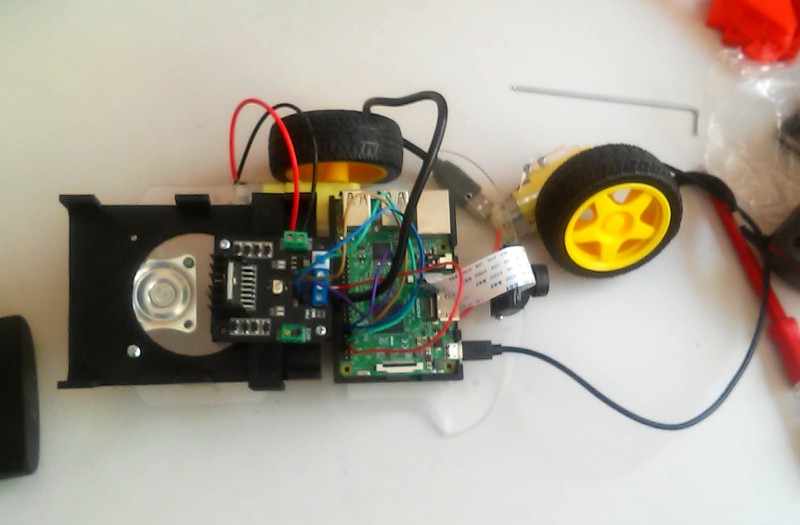
Altough it's a nice project by itself, adding more sensors to this platform is the real purpose of having (almost) real-time controlable vehicle somewhere at the other side of the globe. And it's a real fun to test drive it!



 Fred Fourie
Fred Fourie
 Sean
Sean
 Warren
Warren