 zakqwy
zakqwyEverything arrived, including the 8' long tube stuffed with bubble wrap and CFRP square tubing. Exciting! Two CAD model changes to make prior to getting out the carbide-tipped jigsaw and Space Glue:
1) I'm going to increase the width of the pitch ring to accommodate a pair of 10" propellers. I re-ran a few thrust calcs and realized that at a hover, I'll need to spin over 10k RPM. This may be fine; my new ESCs are high-res units, so I might have decent control despite the relatively high kV of the motor (1350). However, I'd like the option to reduce RPM by increasing the prop diameter. Shouldn't add too much weight.
2) The CFRP I-beam, while totally awesome, lacks torsional rigidity. It's plenty stiff if you use it to span a gap and apply a static load, but it's made of pretty thin stock. I clamped the whole 2' length to my desk and applied a bit of a twist at one end to demonstrate:
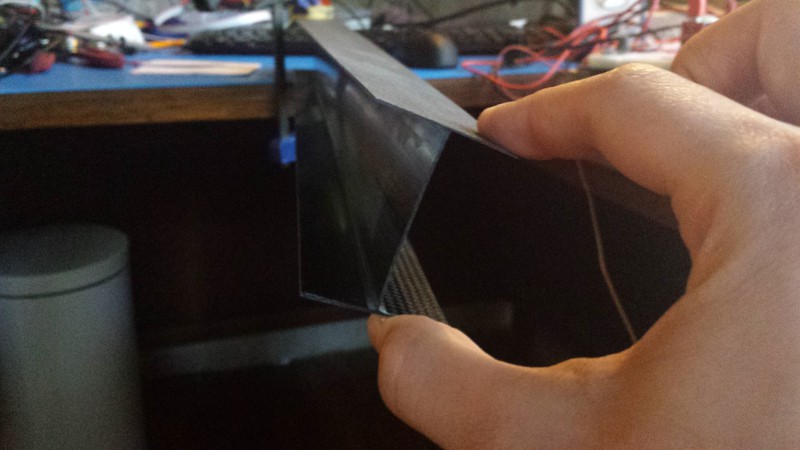
It didn't take much force to deform the beam 15+ degrees. That's not good for my application; I need to be able to quickly rotate the beam from one direction and not have it deform too much. As such, I'm going to swap the I-beam out for square CFRP tube stock; I've got plenty extra from the shipment, it's stiff, and (as an added bonus) it will cut down the prop-to-prop spacing by around 30mm.
Stay tuned! Next update should include the start of the first physical prototype!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.