 fbrktr
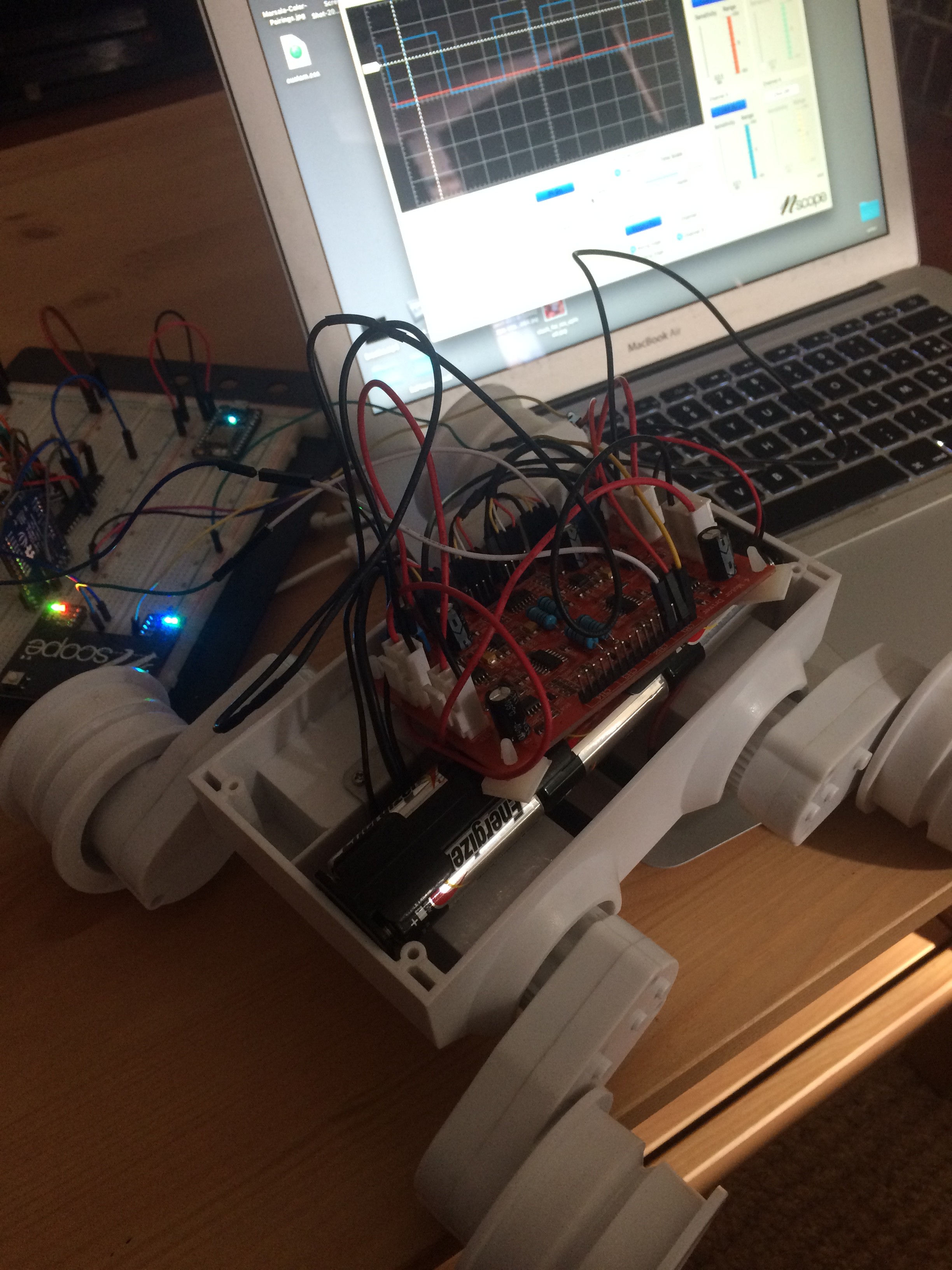
fbrktrMy first intention is to build a robot that can explore it's environment, I may try to make it fully autonomous in the future, but I'll start with a laptop based remote controller.
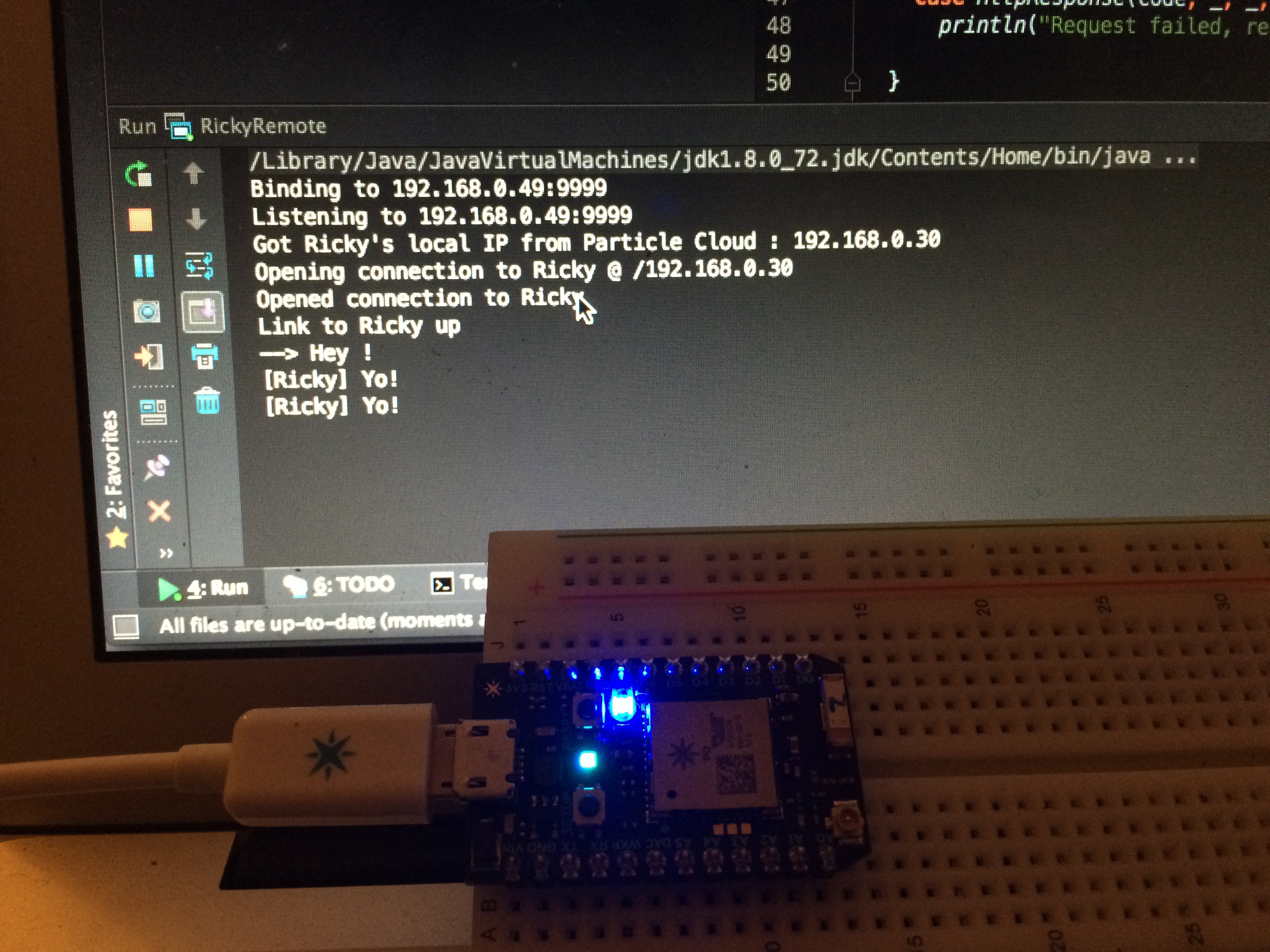
This piece of software has to control everything in the robot in the first place, then, as features are starting to become satisfying, I plan to move them downwards to the robot, first in the photon, and for some of them in dedicated chips.
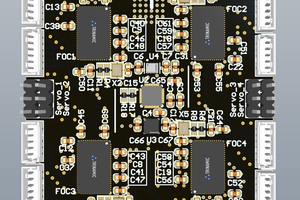
As an ultimate goal, you should be able to click on a map to tell the robot where it has to go, the photon receives this command and translates it into movements, then sends each of them to a 328 which computes appropriates PWMs and sends them to the motor driver.

 ChengDanguo
ChengDanguo
 Jorj Bauer
Jorj Bauer
 Danny FR
Danny FR