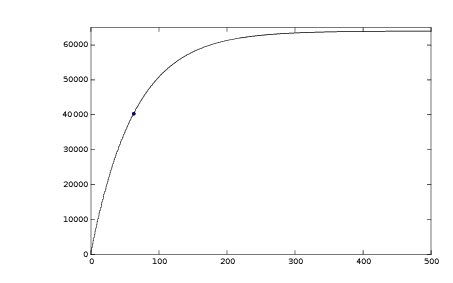
A micro controller can process a low pass filter function, however floating point and even integer multiplication can take too much time to be useful. The following approach uses shifts instead of multiplication. See the project log.
0%
0%
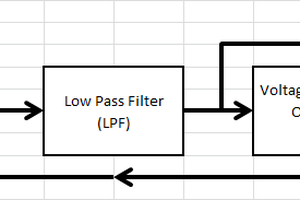
Integer low pass filter
A lowpass filter algorithm for small controllers without multiplier
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 Bruce Land
Bruce Land
 MS-BOSS
MS-BOSS
 agp.cooper
agp.cooper