 Kevin Harrington
Kevin Harrington-
1Install Software BowlerStudio and Sloeber/Esp32 toolchain
Download and install BowlerStudio.
http://commonwealthrobotics.com/
Open BowlerStudio and login with your Github username and password.
Open the SmallKat Model from the menu in BowlerStudio:
Add Device -> Creatures ->SmallKat Grace
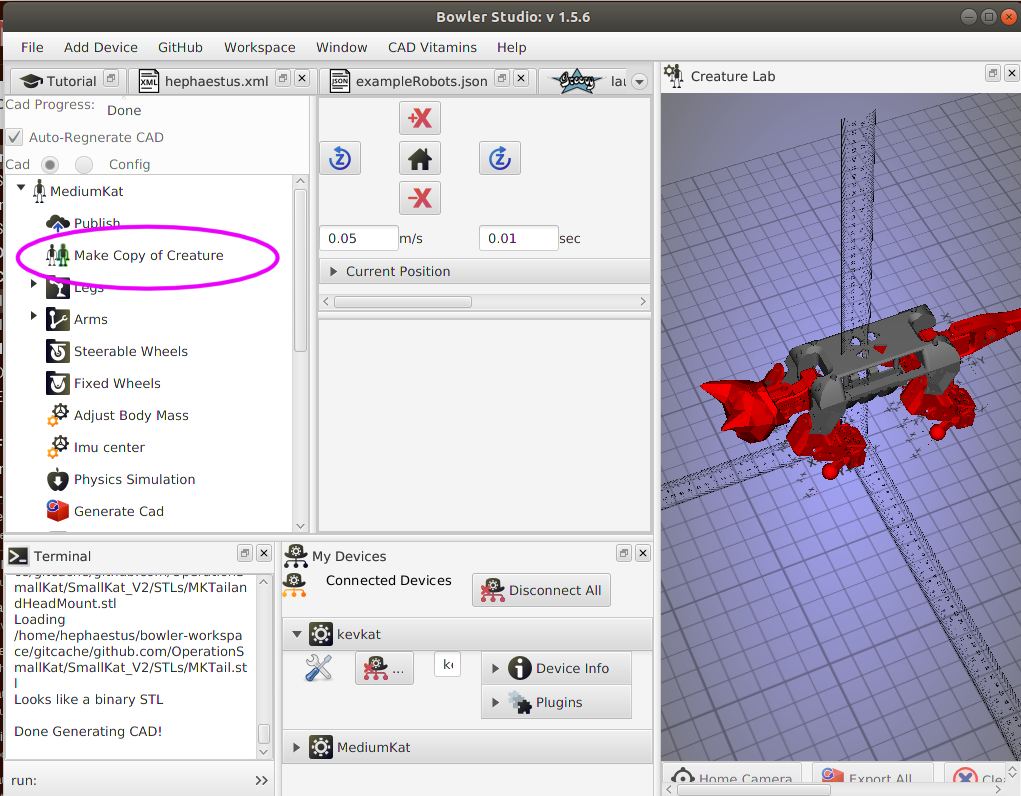
A simulation of your robot will open on the 3d window. You can make it walk using the arrows in the top right of the Creature Lab tab.
To start you see the configuration viewer for your SmallKat. To see the cad select the radio button for CAD in the upper left corner of the MediumKat tab.
Follow these instructions to install Sloeber with the esp32 toolchain bundled: https://github.com/WPIRoboticsEngineering/RobotInterfaceBoard/blob/master/InstallEclipse.md
-
2Create your Smallkat configuration
![]()
-
3Print all the parts
All STL's can be found here:
https://github.com/OperationSmallKat/SmallKat_V2/releases/download/0.0.2/Cat.STLs.1.zip
-
4Fork/Clone the servo Server code
Install the dependent libraries:
ESP32Servo SimplePacketComs Esp32SimplePacketComs Esp32WifiManager Adafruit Unified Sensor Adafruit_BNO055Program the ESP32 your Fork (or clone) of the server for the ESP:
https://github.com/madhephaestus/ESP32ServoServer
Follow these instructions for opening the forked project in Sloeber:
https://github.com/WPIRoboticsEngineering/RobotInterfaceBoard/blob/master/UseEclipse.md
Use the instructions here to attach it to a wifi network or host a network:
-
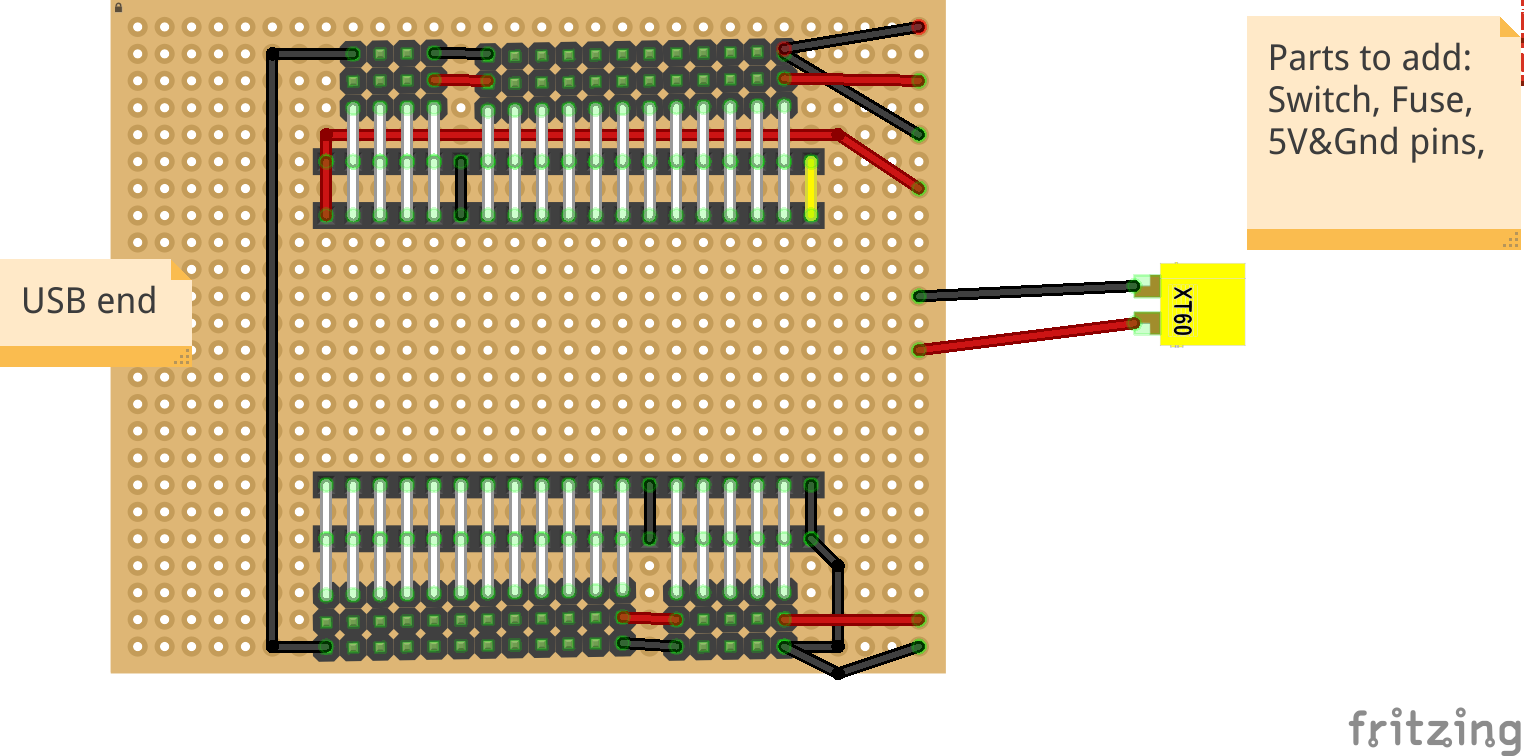
5Wire the Power
The 3 ESC's should be used to power the system. One should power the ESP32 using the 5v in pin. One should power half the servos and the third should power the rest of the servos.
![]()
Image Credit @jtechs
Follow these instructions:
-
6Connect the servos
Attach the servos on the following pins:
RearLeft
- basePan = 2
- baseTilt = 4
- elbow = 15
FrontRight
- basePan = 5
- baseTilt = 17
- elbow = 16
FrontLeft
- basePan = 23
- baseTilt = 19
- elbow = 32
RearRight
- basePan = 13
- baseTilt = 12
- elbow = 14
Head
- basePan = 27
- baseTilt = 26
Tail
- basePan = 33
- baseTilt = 25
-
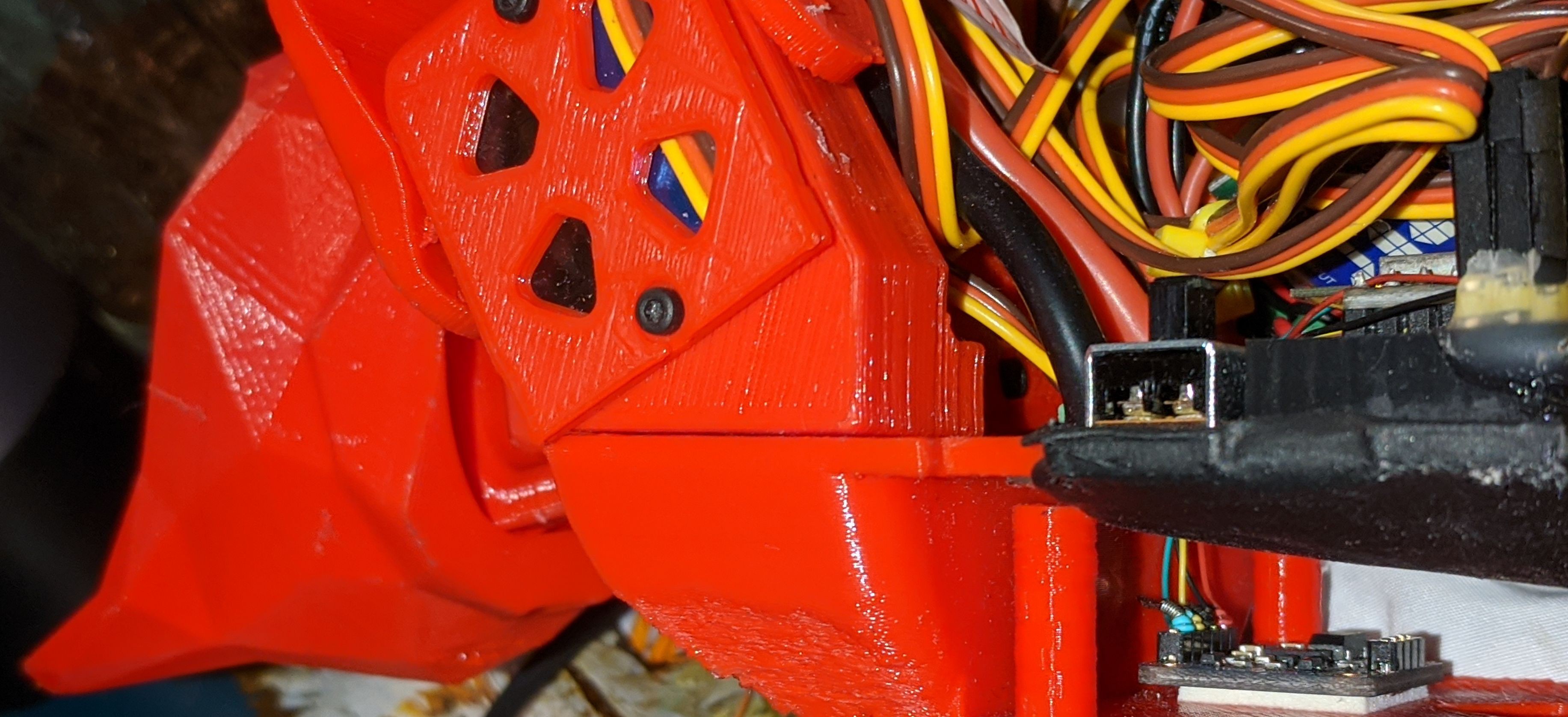
7Assemble the SmallKat
Assemble all small cat plastic pieces with servos.
Use these instructions:
Don't forget to keep the IMU in this orientation:
![]()
-
8Adjust waking parameters
In the creature lab, click on Edit Walking Engine to open the waking engine script. Adjust the parameters to change how your SmallKat walks.
-
9Add a Game Controller
Get a second ESP32 and install the following libraries:
WiiChuck Esp32SimplePacketComs Esp32WifiManager SimplePacketComs ESP32Servo EspWii
Open Controller Server from the EspWii examples and program it.
Connect and Wii accessory to the i2c ports.
Use the serial to connect it to WiFi
Run launch.groovy
SmallKat: An adorable dynamics oriented robot cat
A dynamics oriented quadruped for research and education.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.